TRANSPORTATION AND INSTALLATION MANUAL
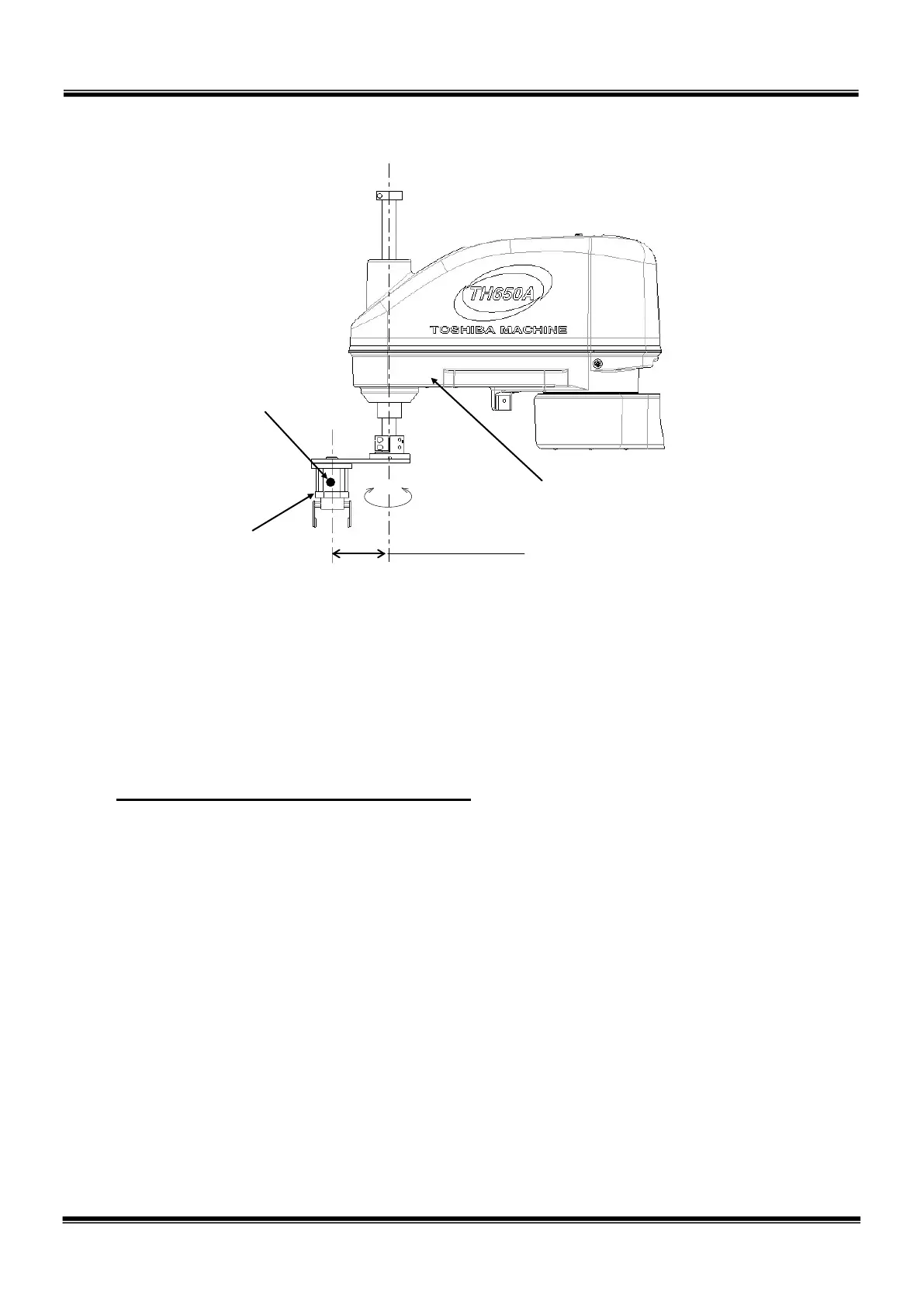
Fig. 5.8 Robot tool
5.3.2 Load Conditions and Program Setting
This robot can automatically change the maximum speed, acceleration/deceleration
and servo gain by using the PAYLOAD command in the program according to the load
conditions.
Be sure to use the PAYLOAD command.
The specific method for using this function is explained below.
a) PAYLOAD command format
The PAYLOAD command format is written as shown below if the tool mass is M
kg and the gravity center offset is L mm.
PAYLOAD = {M, L}
M : Load mass (unit: kg)
L : Offset value of gravity center (unit: mm)
The PAYLOAD command has the following functions.
• The maximum speed and acceleration/deceleration of each robot axis are
automatically changed according to the set load conditions.
Offset value of gravity center
STE 85305
– 65 –

 Loading...
Loading...





