Operation MicronNav System
0656-SOM-00001-07 68 © Tritech International Ltd.
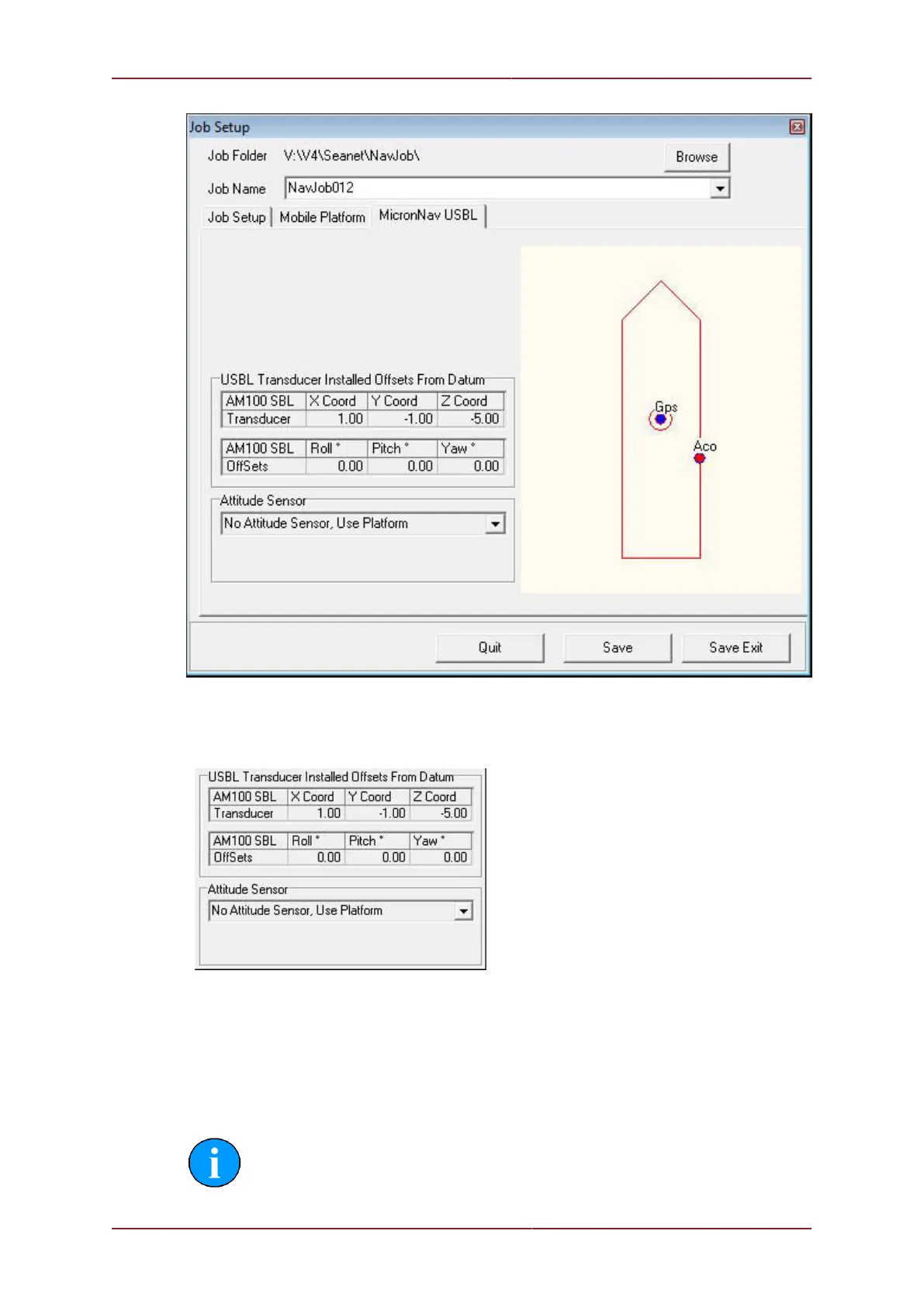
Select the source of the Pitch and Roll data, this can either be MicronNav100 Attitude
Sensor (for the USBL Dunking Transducer internal sensor) or No Attitude Sensor,
Use Platform if using a third party MRU sensor.
This completes the job setup for a Mobile Platform/Vessel, click on the Save and Exit button
to confirm the setup and close the Job Setup window.
Operating from a Fixed Platform or Dockside
Firstly enter the details on the Job Setup tab. The details will be similar to a mobile setup and
the steps from the previous section can be followed.
Note
Make sure that the Platform variable is set to Fixed Platform.