170
Appendix2-Technical Specifications
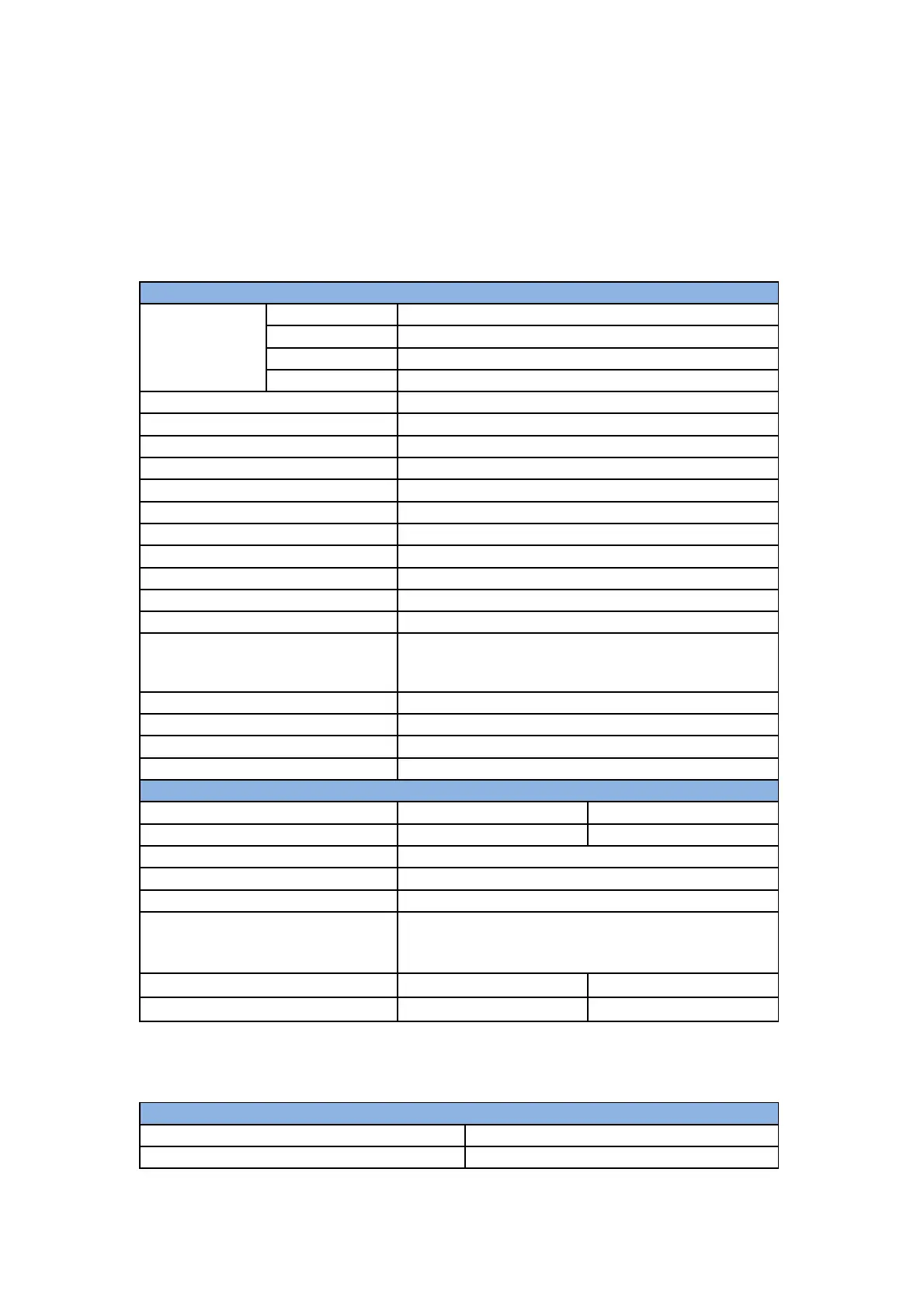
2.1 xArm5/6/7 Common Specifications
Max Speed of End-effector
*Ambient Temperature Range
Min 8.4 W, Typical 200W, Max 400W
xArm Studio/Python/C++/ROS
Robotic Arm Communication Protocol
End-effector I/O Interface
2 Digital inputs, 2 Digital outputs,
2 Analog inputs
End-effector Communication Protocol
DIN ISO 9409-1-A50/63(M5*6)
Control Box Communication Protocol
Control Box Communication Model
Control Box I/O Interface
8*CI(Digital In) 8*CO(Digital Out)
2*AI(Analog In) 2*AO(Analog Out)
xArm accessories parameters:
Absolute Maximum Supply Voltage