3.1.3. Precautions
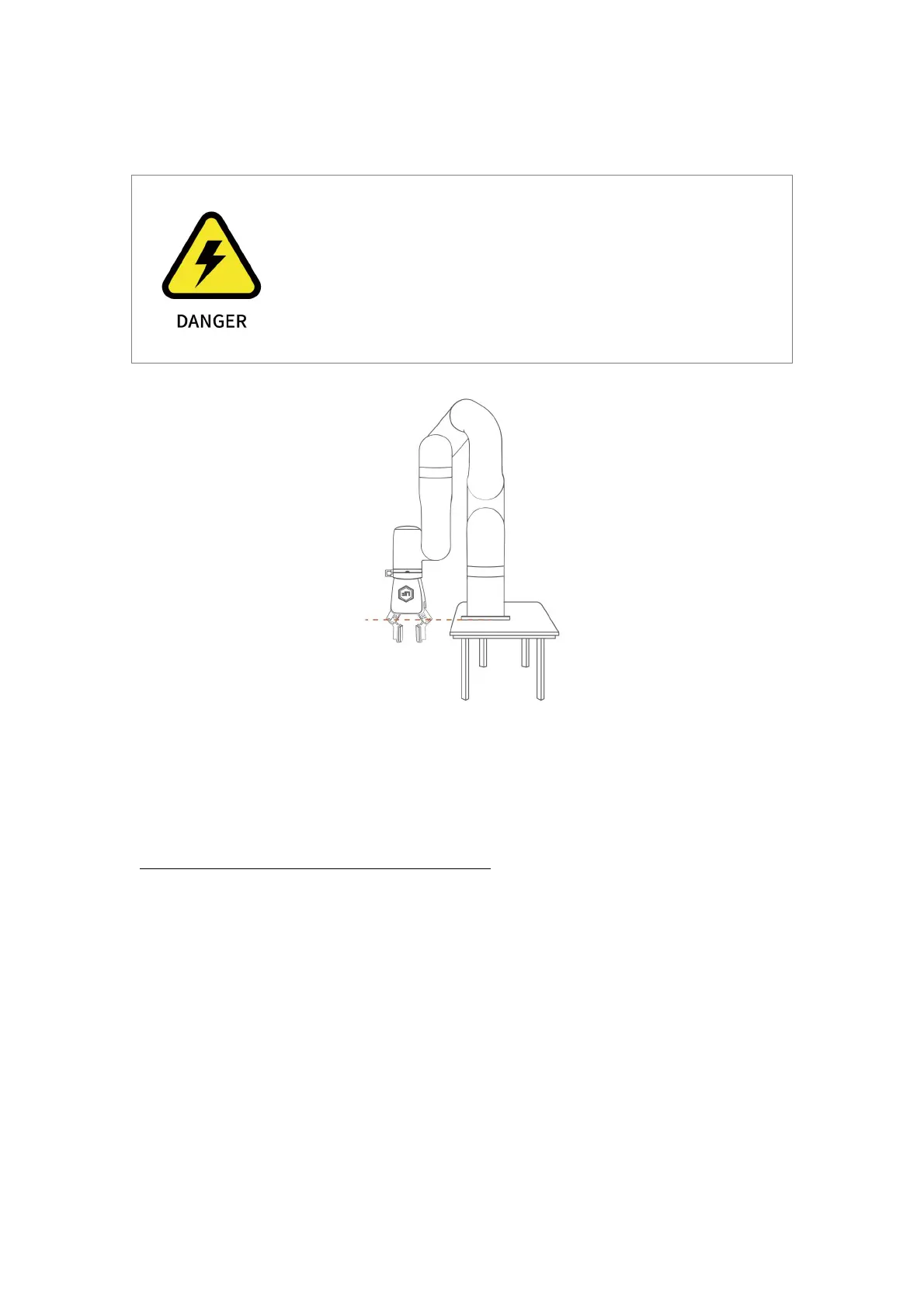
1. When the robotic arm is in the zero position, the gripper will
exceed the installation surface. Please adjust the robotic arm to a
posture suitable for installing the gripper during installation.
2.When a robotic arm equipped with a gripper is used for
trajectory planning, it is necessary to perform a safety
assessment on whether to return to the zero-point or whether the
operation can be performed and to avoid collisions.