76
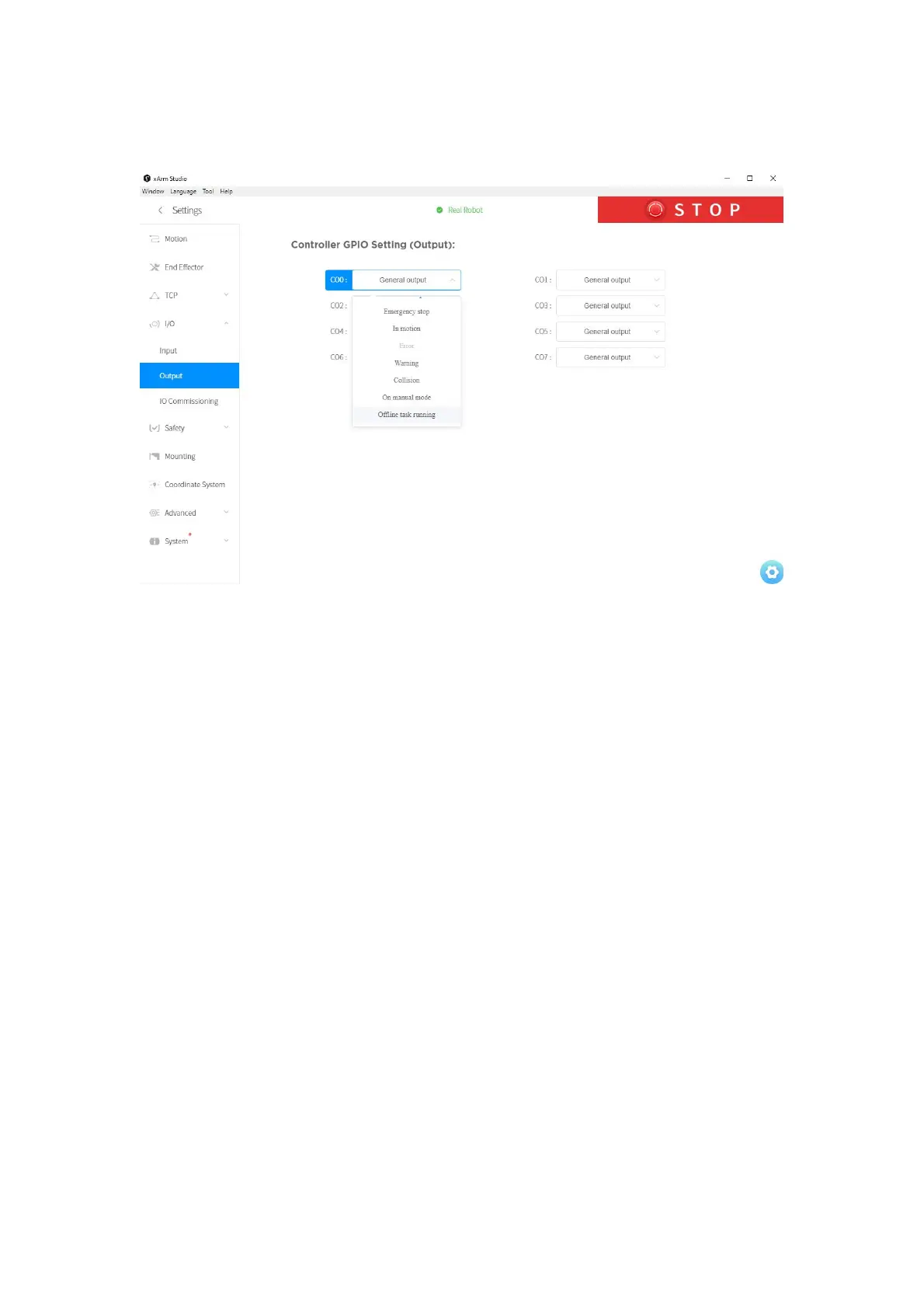
1.4.4.2 Output
The below functions can be configured for each output.
【General Output】
● General purpose output, can be configured in programs to output signals.
【Emergency Stop】
● The system enters an emergency stop state and outputs a low level signal.
Otherwise, the output is high. This safety function will come in pairs for
redundancy.
The actions that conform to the emergency stop are:
1. When the Emergency Stop button of the control box is pressed, the power supply of
the robotic arm is cut off.
2. Stop button of xArm Studio and Emergency stop code block of Blockly.
3. IO input is set to an emergency stop.
4. Emergency stop API of SDK.