86
【Default】: The data is the default current base coordinate offset.
【Cancel】: Cancel the selection.
【Save】: Save the modified data.
【Discard】: Discard the modified data.
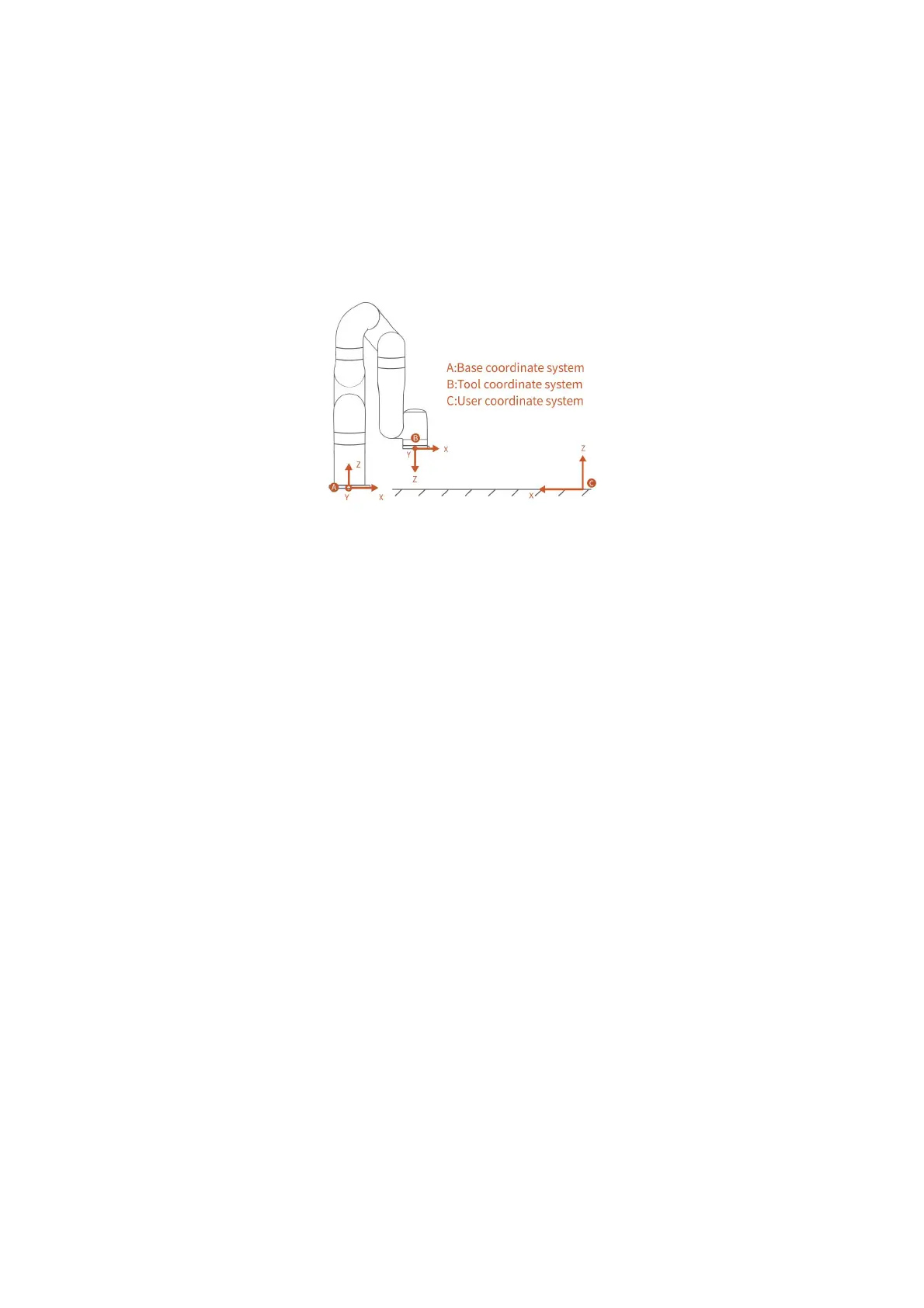
Example:
When expressed in coordinate system {A}:
B is (207,0,112,180,0,0) , D
AC
= 1000mm , if user want to set the world reference coordinate
system to {C}, just express the position and orientation of user coordinate system {C} in
coordinate system {A}.
As figure shown, the offset of the base coordinate system should be (1000,0,0,0,0,180).
Former TCP coordinates of B (207,0,112,180,0,0) in base coordinate system, after user coordinate
system offset setting:
Becomes: B ’(793,0,112,180,0,180)