96
When releasing the joint brakes, someone must support the
robot's posture to prevent the robotic arm from falling
without external force and damage the robotic arm and
surrounding equipment.
After the release of the joint brake and manually dragging
the robotic arm, please always pay attention to the degree of
joint rotation to avoid exceeding the rotation range of the
robot joint and damage the internal structure of the robotic
arm.
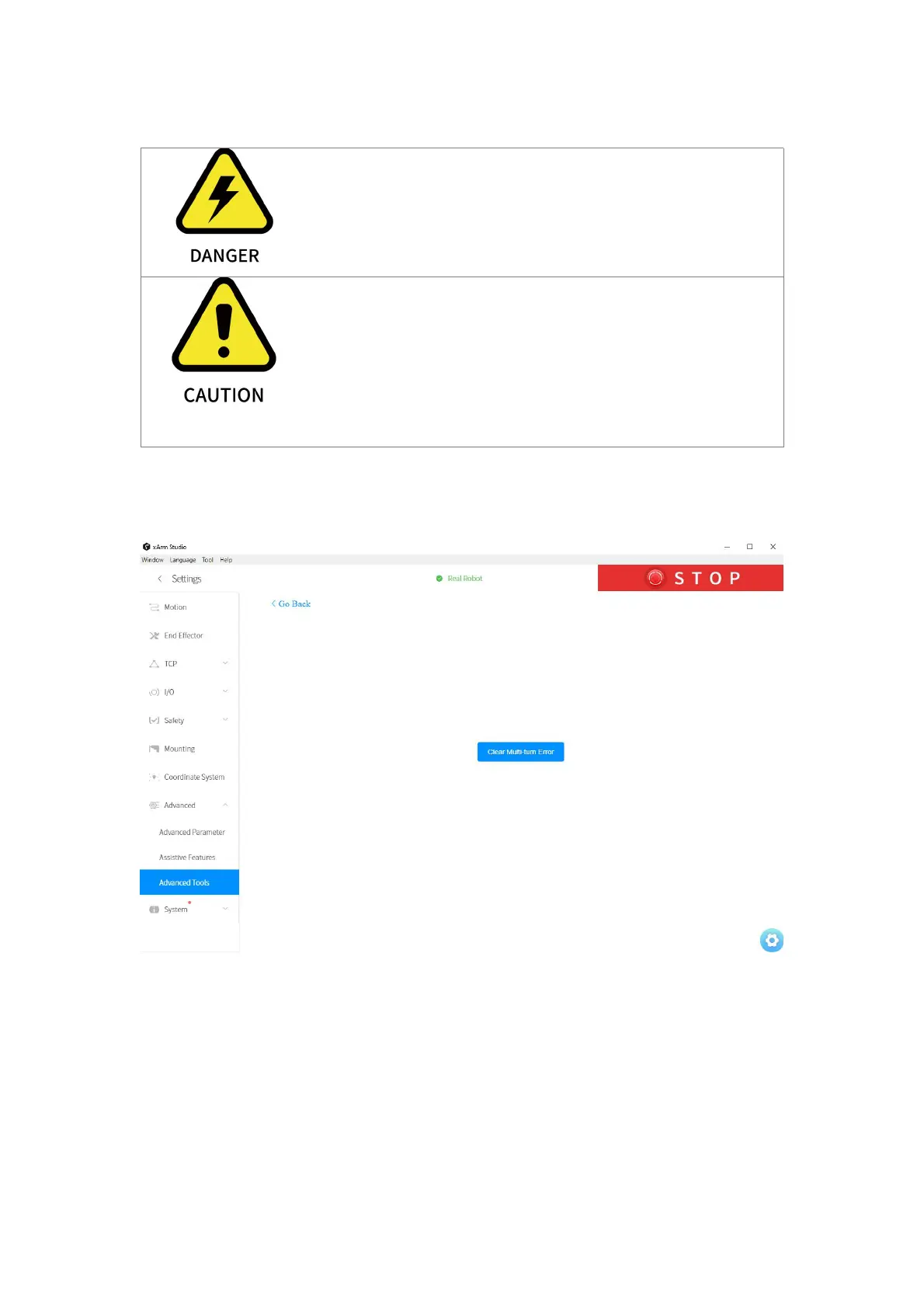
3. Multiturn-Encoder Error Clear
When the control box reports "multi-turn encoder error", please use this tool to clear
the error.