All rights reserved 15 Servicemanual_UR10_en_3.1.3
Assemble:
1. After replacing a joint etc. do as follows to assemble the robot arm.
2. Gently insert one part with screws and washers into the other part.
3. Make sure the washers are fully inserted and flush against the head of the bolt (this is important)
before gently twisting the parts in opposite directions until a mechanical stop is met.
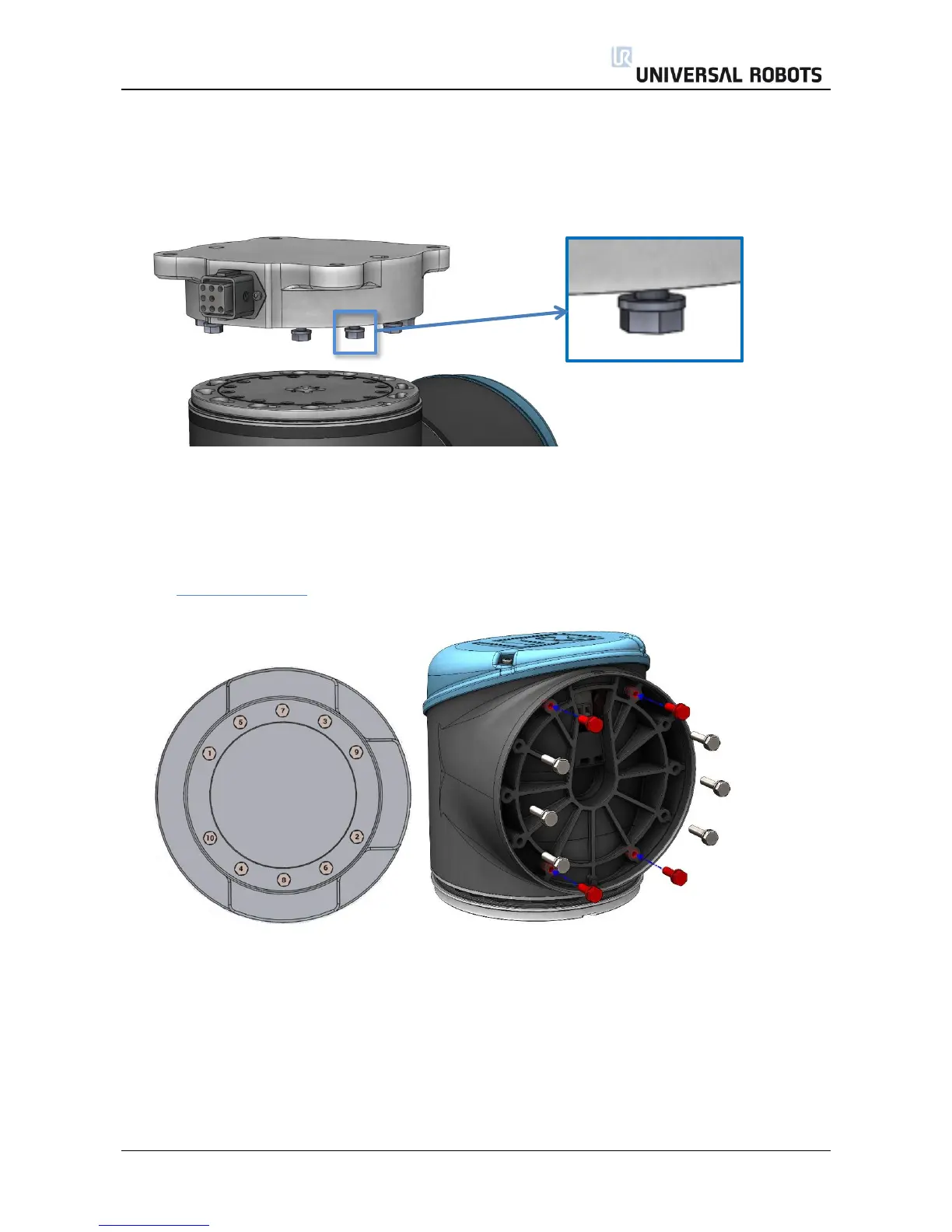
4. Gently tighten the 10 screws, tighten in cross order with the correct torque. When shorter bolts are
used (marked with red) drawing on the right shows where they are mounted.
See 3.1.5 Torque values
Tighten in numeric order.