Inspection
1. Unmount any tool/s or attachment/s or set the TCP/Payload/CoG according to tool
specifications.
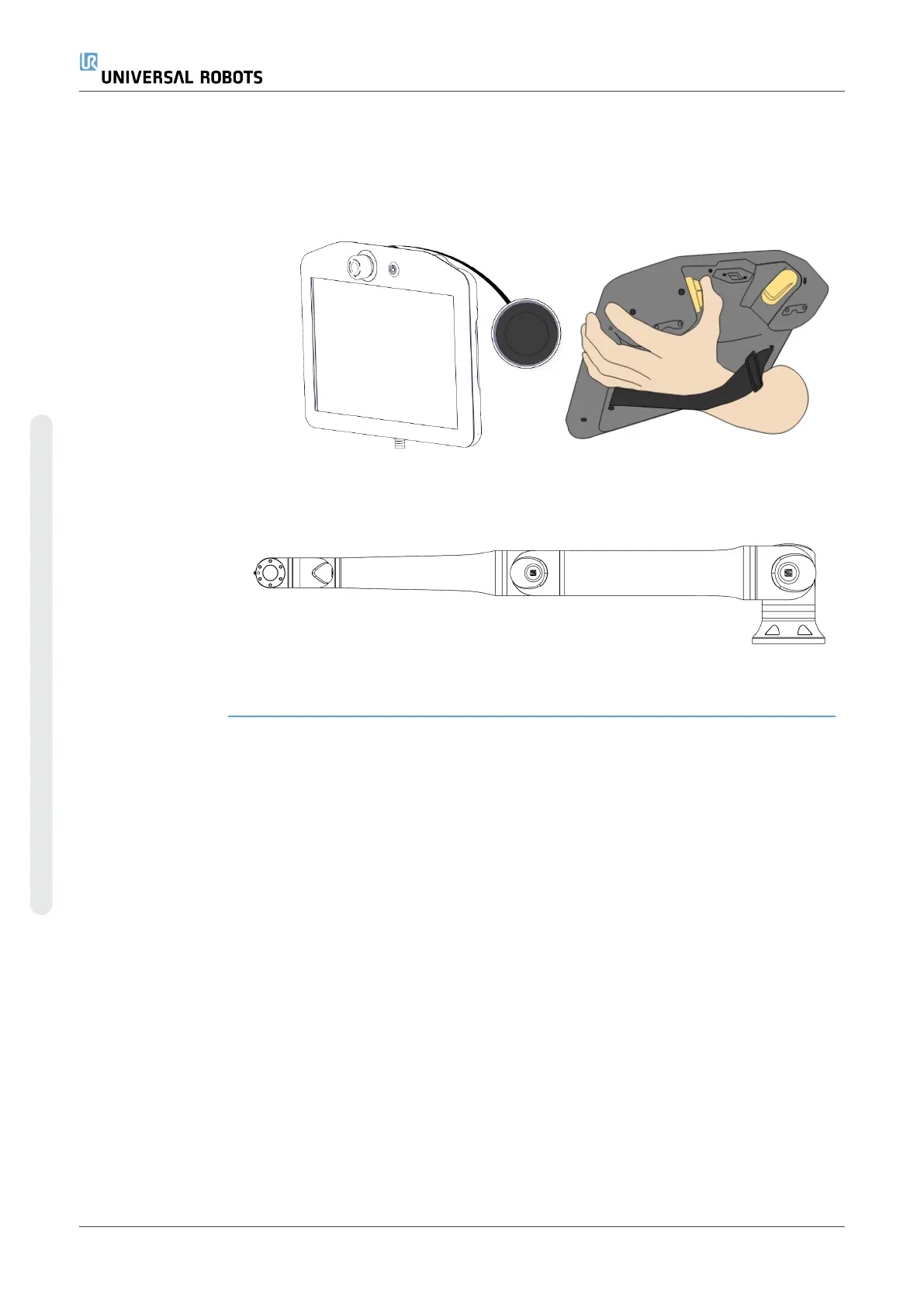
2. To move the robot arm in Freedrive:
•
On a 3PE Teach Pendant, rapidly light-press, release, light-press again and
keep holding the 3PE button in this position.
Power button 3PE button
3. Pull/Push the robot to a horizontally elongated position and release.
4. Verify the robot arm can maintain the position without support and without activating
Freedrive.
UR10e PolyScope X 82 User Manual
7.Robot Arm Cleaning and Inspection
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.