Parameter Details
12
12.3 b: Application
YASKAWA SIEPC71061753C GA500 Technical Manual 531
■ b5-02: Proportional Gain (P)
No.
(Hex.)
Name Description
Default
(Range)
b5-02
(01A6)
RUN
Proportional Gain (P)
Sets the proportional gain (P) that is applied to PID input.
1.00
(0.00 - 25.00)
Larger values decrease errors, but can cause oscillations. Smaller values let too much offset between the setpoint
and feedback.
Set b5-02 = 0.00 to disable P control.
■ b5-03: Integral Time (I)
No.
(Hex.)
Name Description
Default
(Range)
b5-03
(01A7)
RUN
Integral Time (I)
Sets the integral time (I) that is applied to PID input.
1.0 s
(0.0 - 360.0 s)
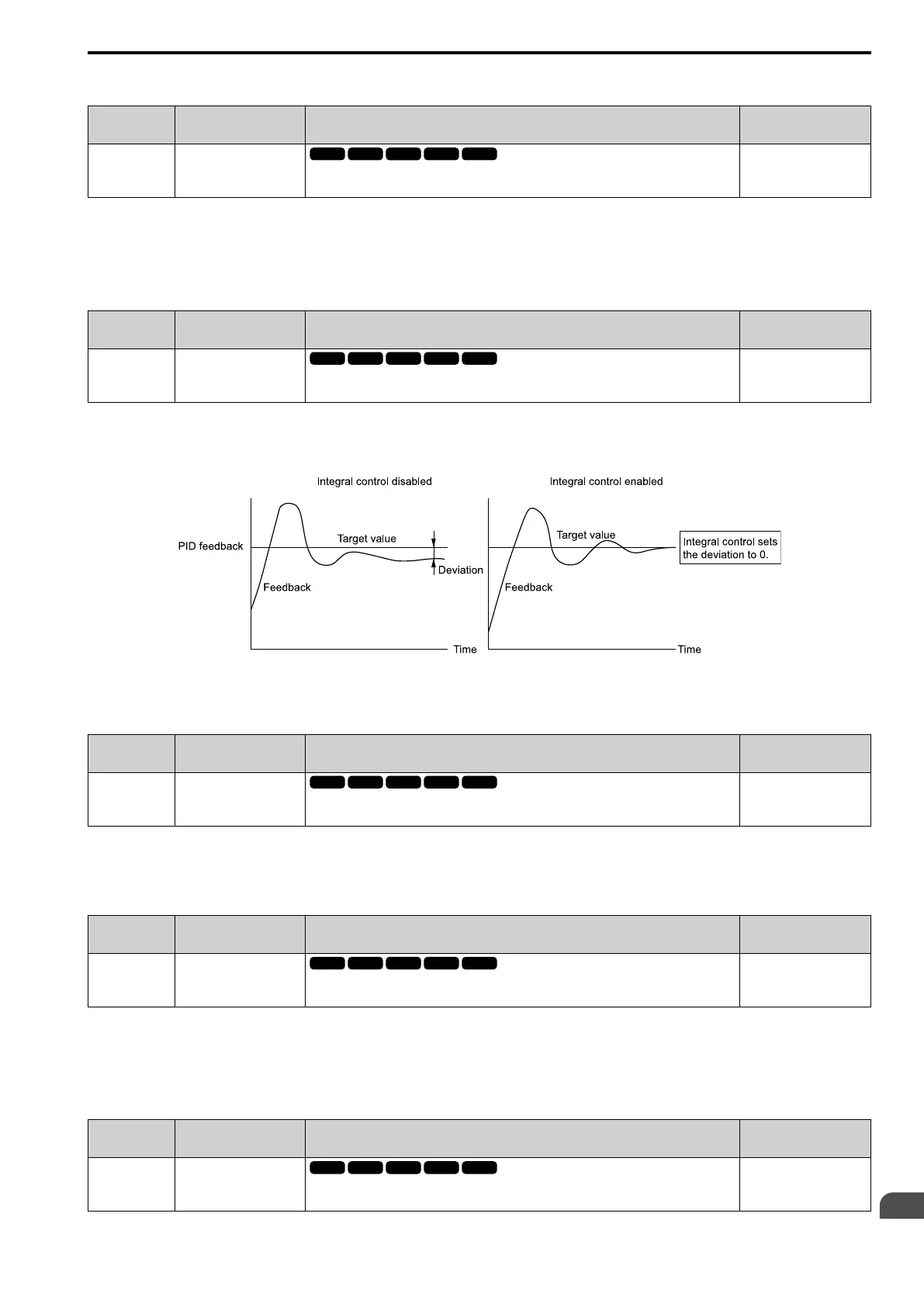
Set a short integral time in b5-03 to remove the offset more quickly. If the integral time is too short, overshoot or
oscillation can occur.
Set b5-03 = 0.00 to disable I control.
Figure 12.33 Integral Time and Deviation
■ b5-04: Integral Limit
No.
(Hex.)
Name Description
Default
(Range)
b5-04
(01A8)
RUN
Integral Limit
Sets the upper limit for integral control (I) as a percentage of the Maximum Output Frequency.
100.0%
(0.0 - 100.0%)
Applications with loads that quickly change will cause the output of the PID function to oscillate. Set this
parameter to a low value to prevent oscillation, mechanical loss, and motor speed loss.
■ b5-05: Derivative Time (D)
No.
(Hex.)
Name Description
Default
(Range)
b5-05
(01A9)
RUN
Derivative Time (D)
Sets the derivative time (D) for PID control. This parameter adjusts system responsiveness.
0.00 s
(0.00 - 10.00 s)
When you increase the time setting, it will increase controller responsiveness, but it can also cause vibration.
When you decrease the time setting, it will suppress overshoot and decrease controller responsiveness.
Set b5-05 = 0.00 to disable D control.
■ b5-06: PID Output Limit
No.
(Hex.)
Name Description
Default
(Range)
b5-06
(01AA)
RUN
PID Output Limit
Sets the maximum possible output from the PID controller as a percentage of the Maximum
Output Frequency.
100.0%
(0.0 - 100.0%)
 Loading...
Loading...







