9.1 Troubleshooting
9-19
9
High Rota-
tion Speed
Overshoot on
Starting and
Stopping.
Speed loop gain value (Pn100) too
high.
Factory setting: Kv=40.0 Hz
,
Refer to the gain adjustment in User’s
Manual.
Reduce the speed loop gain Pn100 preset value.
Position loop gain value (Pn102)
too high
Factory setting: Kp=40.0/s
Refer to the gain adjustment in User’s
Manual.
Reduce the position loop gain Pn102 preset value.
Incorrect speed loop integral time
constant Pn101 setting
Factory setting: Ti=20.00 ms
Refer to the gain adjustment in User’s
Manual.
Correct the speed loop integral time constant Pn101
setting.
Incorrect moment of inertia ratio
data Pn103
Check the rotational moment of inertia
ratio data Pn103.
Correct the rotational moment of inertia ratio data
Pn103.
Use the mode switch setting function.
ABS
(absolute)
Position
Difference
Error
(The position
saved in
Host control-
ler when the
power turned
OFF is differ-
ent from the
position when
the power
turned ON.)
Noise interference due to improper
encoder cable specifications
The specifications of encoder cable must
be:
Tinned annealed copper twisted-pair or
twisted-pair shielded wires with core
0.12 mm
2
(0.0002 in
2
) min.
Use encoder cable with the specified specifications.
Noise interference because the
encoder cable distance is too long.
The maximum allowable cable length is
20 m (65.6 ft).
The encoder cable distance must be within the speci-
fied range.
Noise interference due to damaged
encoder cable
Noise interference to the signal line
because the encoder cable is bent or
damaged
Correct the encoder cable layout.
Excessive noise to the encoder
cable
Check if the encoder cable is bundled
with a high-current line or near high-cur-
rent line.
Change the encoder cable layout so that no surge is
applied.
FG affected by noise from
machines such as welder installed
on servomotor side
Check if the grounding for the machine
is properly made.
Ground encoder to FG; do not share a ground with a
machine.
SERVOPACK pulse counting
error due to noise interference
Check if the signal line from the encoder
receives influence from noise interfer-
ence.
Take measures against noise for encoder wiring.
Excessive vibration and shock to
the encoder
Vibration from machine or servomotor
due to incorrect installation.
Reduce vibration from machine or mount securely
the servomotor
Encoder fault Encoder fault (no change in pulse count) Replace the servomotor.
SERVOPACK fault Check the multi-turn data from
SERVOPACK.
Replace the SERVOPACK.
Host controller multi-turn data
reading error
Check for the error detection at the host
controller.
Correct the error detection section of host controller.
Check if the host controller executes data
parity check.
Execute the multi-turn data parity check.
Check the noise on the signal line
between SERVOPACK and the host con-
troller.
Execute the multi-turn data parity check. Noises may
influence when the parity check is not executed.
Overtravel
(OT)
(Movement
over the zone
specified by
the host con-
troller)
An overtravel signal is output (P-
OT (1CN-2) or N-OT (1CN-3) is
at “H”.
Check if the voltage of input signal
external power supply (+24 V) is correct.
Connect to the external +24 V power supply.
Check if the overtravel limit switch (SW)
operates properly.
Correct the overtravel limit SW.
Check if the overtravel limit switch (SW)
is connected correctly.
Correct the overtravel limit SW wiring.
The overtravel signal does not
operate normally.
Input signal external power supply fluc-
tuation
Stabilize the external +24 V power supply voltage.
Check if the overtravel limit switch (SW)
activate correctly.
Adjust the overtravel limit SW.
Check if the overtravel limit switch wir-
ing is correct.
Correct the overtravel limit SW wiring.
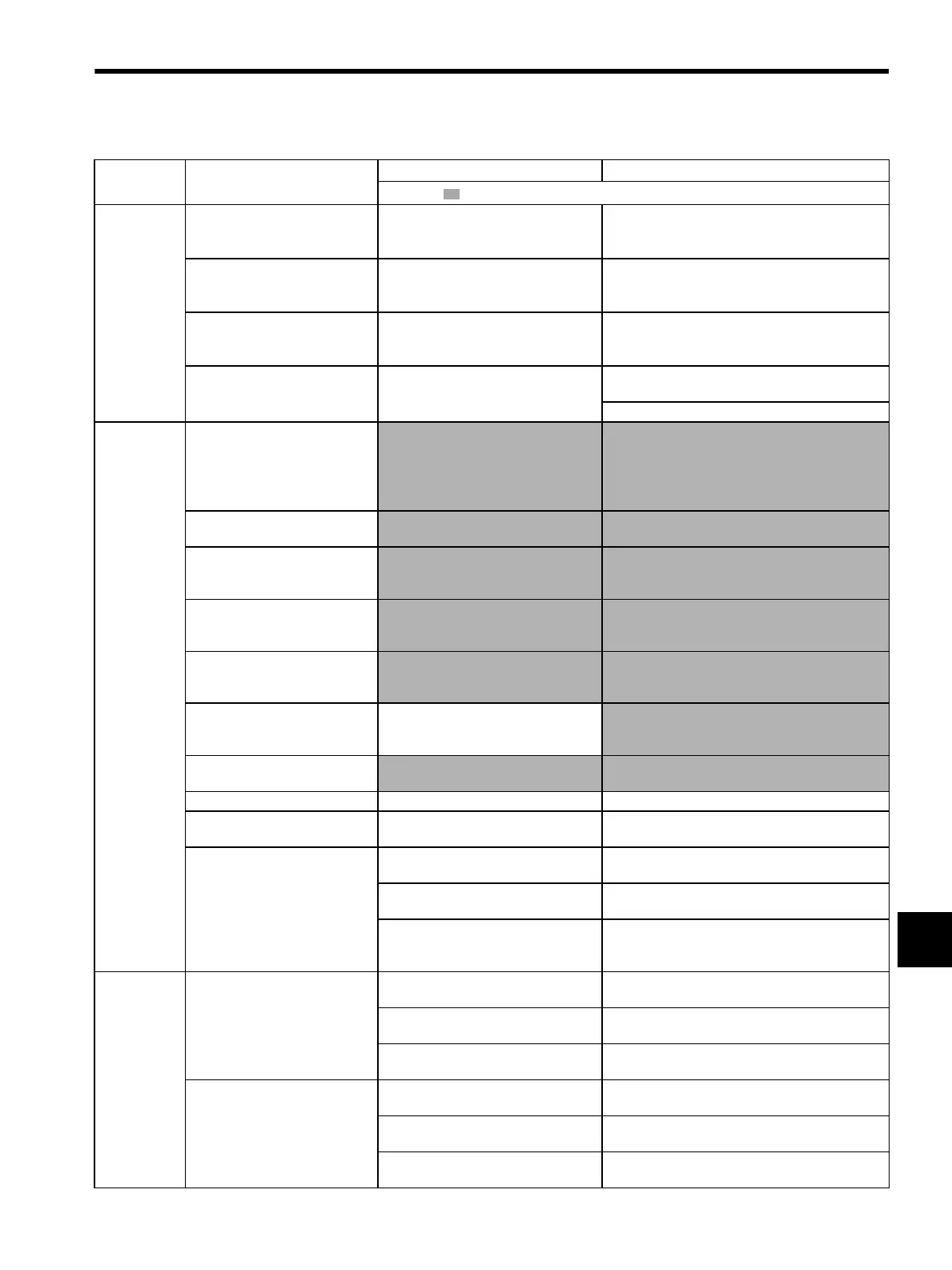
Table 9.5 Troubleshooting for Malfunction without Alarm Display (Cont’d)
Symptom Cause
Inspection Corrective Actions
: Turn OFF the servo system before executing operations.
SIEPS80000025.book 19 ページ 2004年10月25日 月曜日 午前11時57分
 Loading...
Loading...
