180
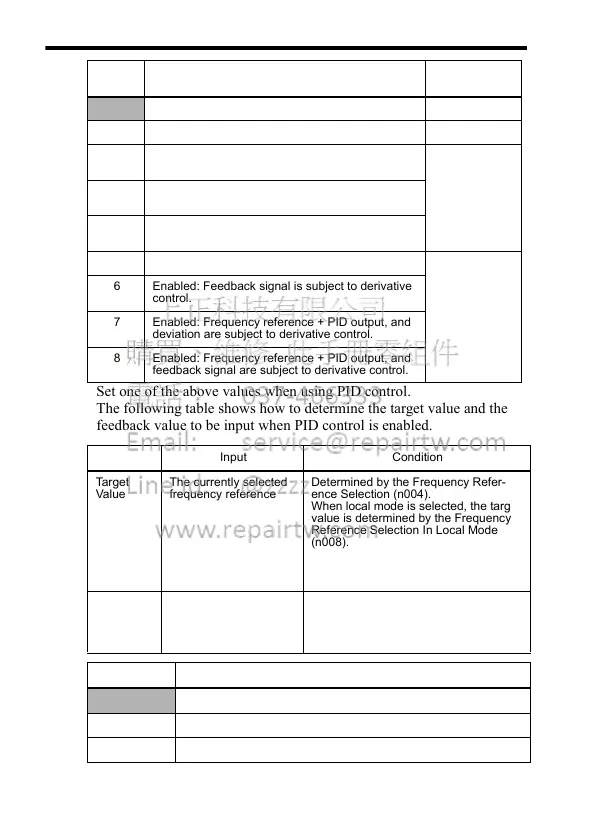
Set one of the above values when using PID control.
The following table shows how to determine the target value and the
feedback value to be input when PID control is enabled.
Setting Function PID Output
Characteristics
0Disabled. -
1 Enabled: Deviation is subject to derivative control. Forward
2 Enabled: Feedback signal is subject to derivative
control.
Forward
3 Enabled: Frequency reference + PID output, and
deviation are subject to derivative control.
4 Enabled: Frequency reference + PID output, and
feedback signal are subject to derivative control.
5 Enabled: Deviation is subject to derivative control. Reverse
6 Enabled: Feedback signal is subject to derivative
control.
7 Enabled: Frequency reference + PID output, and
deviation are subject to derivative control.
8 Enabled: Frequency reference + PID output, and
feedback signal are subject to derivative control.
Input Condition
Target
Value
The currently selected
frequency reference
Determined by the Frequency Refer-
ence Selection (n004).
When local mode is selected, the target
value is determined by the Frequency
Reference Selection In Local Mode
(n008).
When multi-step references are select-
ed, the currently selected frequency ref-
erence will be the target value.
Feedback
Value
The frequency refer-
ence that is set in the
PID Feedback Value
Selection (n164)
-
n164 Setting Description
0 Not used.
1 Not used.
2 Not used.