C5-2
IM 34M06H62-02E 2nd Edition : June 2008-00
Dynamic auto-tuning does not operate when any of the following conditions is true.
- When Dynamic auto-tuning Enable (SELF) is set to “0: Disabled”
- When Control Type Selection (OT) is not set to “0: PID Control”
- When Zone PID Selection (ZONE) is set to “1: Enabled”
- When Run/Stop Selection (RUN/STP) is set to “0: Stop”
- When Automatic/Manual/Cascade Selection (A/M/C) is set to “1: Manual”.
- When Remote/Local Selection (RMT/LOC) is set to “1: Remote”.
- For the secondary loop in cascade control
- When the Rate-of-Change Limit (MVR) is not “0: Off”
- When the SP Up Gradient (SPR.UP) or SP Down Gradient (SPR.DN) is not “0: Off”.
- When a burnout or AD converter error is detected
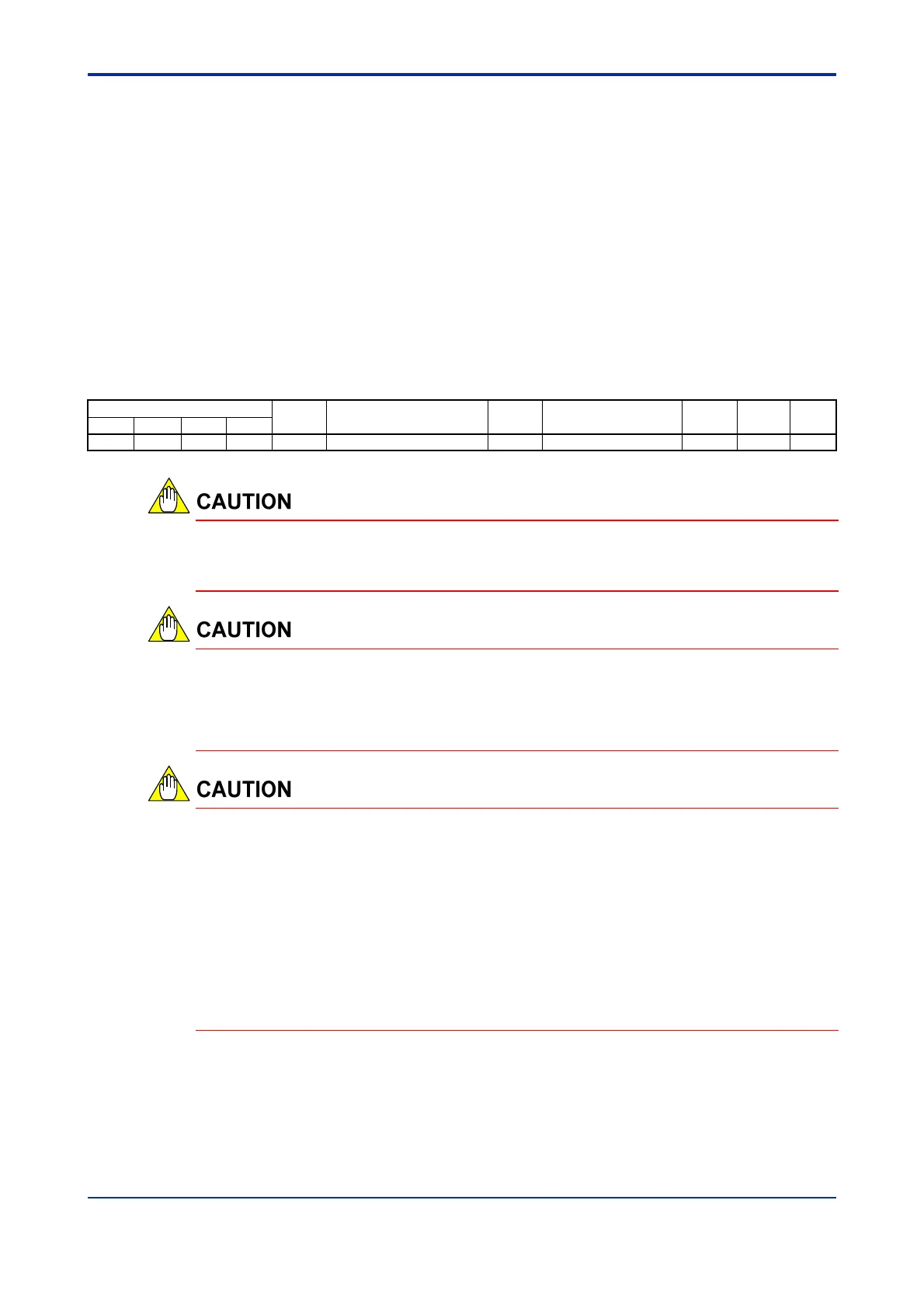
Table C5.1 Parameters Related to Dynamic auto-tuning
Data Position Number
Symbol Description Unit Data Range
Default
Value
Attribute
Stored
Loop1 Loop2 Loop3 Loop4
181 381 581 781 SELF Dynamic auto-tuning enable None 0: disabled; 1: enabled 0 RW
Dynamic auto-tuning updates the PID parameters automatically when PID values are
calculated. In situations where this is undesirable, set the Dynamic auto-tuning Enable
(SELF) parameter to “0: Disabled”.
Dynamic auto-tuning should not be used with the following processes:
- Equipment with interference and equipment subjected to regular external
disturbances
- Fast response processes such as flow control or pressure control systems
When performing dynamic auto-tuning, always turn on the controlled load (e.g. heater)
before starting dynamic auto-tuning. In addition, always perform control in a closed loop.
If you fail to observe these precautions, or if there are interference or external
disturbances during measurement, the calculated PID values may be inappropriate. If
control remains unstable even after you continue with dynamic auto-tuning, adopt the
following measures and recalculate the PID values.
- Set the PID group in use to the following values: PB=5.0%; TI=1 second; TD=Off.
- Enter Stop mode, and again change to Run mode.
If you still cannot achieve stable control after adopting these measures, disable dynamic
auto-tuning, and perform normal auto-tuning, or calculate the PID values manually.

 Loading...
Loading...