ControlMaster CM30, CM50 and CMF310
Universal process controllers,
1
/4,
1
/2 DIN and fieldmount 6 Basic Level
IM/CM/ED–EN Rev. X 29
…Basic
Loop 1 (2) Control
On/Off Hysteresis Sets the hysteresis value in engineering units.
Note. Applicable only if Control Type is On/Off – see page 49.
Mode Tur ns the Autotune functionality on or off. When set to On, an Autotune can be started from
the Operator level menus – see page 23.
Autotune Autotune is a user-activated feature that enables automatic setting of the controller PID
parameters (see page 30) using an
'at setpoint type' algorithm. Autotune changes the
controller output and then monitors the process response to calculate the optimum PID
settings. Autotune uses a relay-type function with hysteresis that initiates a controlled
oscillation in the process. New PID parameters are calculated and stored in the controller
automatically.
Note. To achieve the best results from Autotune, switch the controller to Manual control
mode (see page 6) and adjust the output until the PV is stable (close to the normal setpoint)
before initiating Autotune.
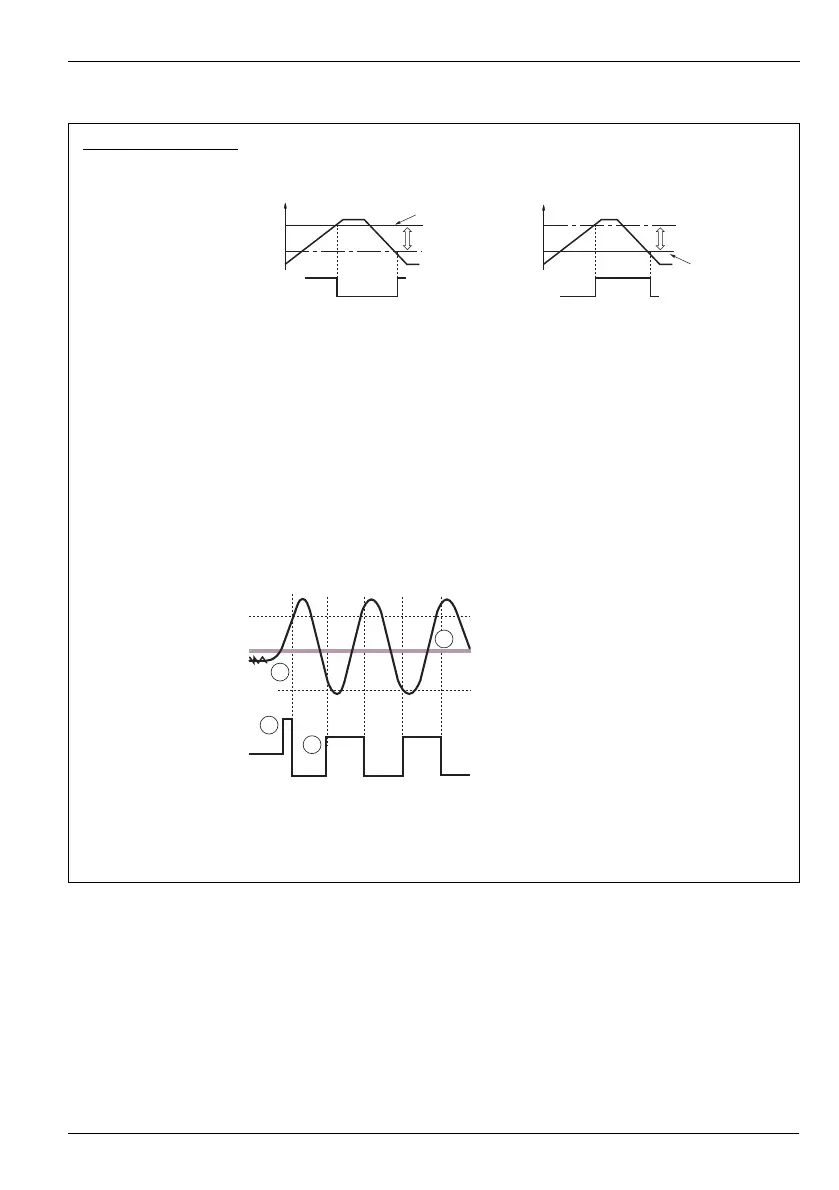
Autotune Operation
The Autotune sequence is shown in the following figure:
PV
PV
ON
OFF
Reverse Acting Control Output
Setpoint
Hysteresis
Value
Hysteresis
Value
Setpoint
Direct Acting Control Output
ON
OFF
SP
PV
1 Set the first step value and dynamics required. For best
results, select the largest initial output step size that can
be tolerated by the process.
2 Autotune is enabled only if the control type is PID.
3 Start Autotune from the Operator menu.
4 Monitors a noise A and calculates a hysteresis
value
?
5 User-defined initial step in the output B.When the
process exceeds the hysteresis value the output is
stepped down.
6 Adjusts output amplitude automatically C so PV
disturbance is kept to minimum required.
7 When consistent oscillation is established D, the
Autotune process stops. Optimum settings are
calculated from the process dynamics monitored.