Start-up 47
Parameter setting examples – ACSM1
Position control with the CiA 402 profile position
mode (pp)
This example shows how to configure a basic positioning
application for an ACSM1 motion control drive. The start/stop
commands and reference are according to the profile position
mode (pp) of the CiA 402 profile.
When configuring the master, you need to map the following
objects to the transmit and receive PDOs. For an example, see
section Mapping objects required for controlling the drive on
page 66.
The target position and actual value are defined as 32-bit integer
values; both are scaled as defined by drive parameter settings.
The target position (reference) and the position actual value are
scaled as follows:
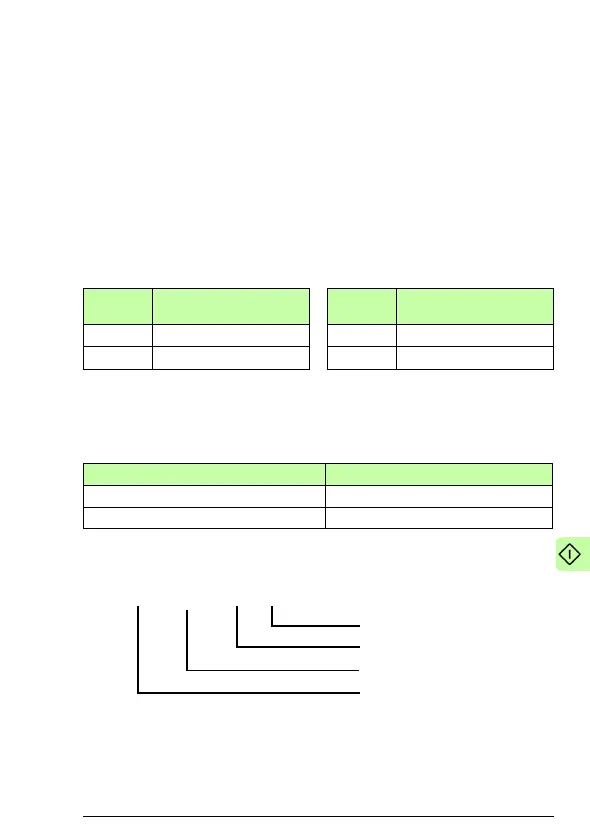
CANopen
object
Output data CANopen
object
Input data
0x6040 Control word 0x6041 Status word
0x607A Target position 0x6064 Position actual value
Drive parameter Setting
60.05 POS UNIT (Position unit) m
60.08 POS2INT SCALE 100
1000 / 100 = 10.00
m
60.05 POS UNIT
Physical value
60.08 POS2INT SCALE
Set point value