NoteAction
1 screw: M6 x 8.
xx0300000612
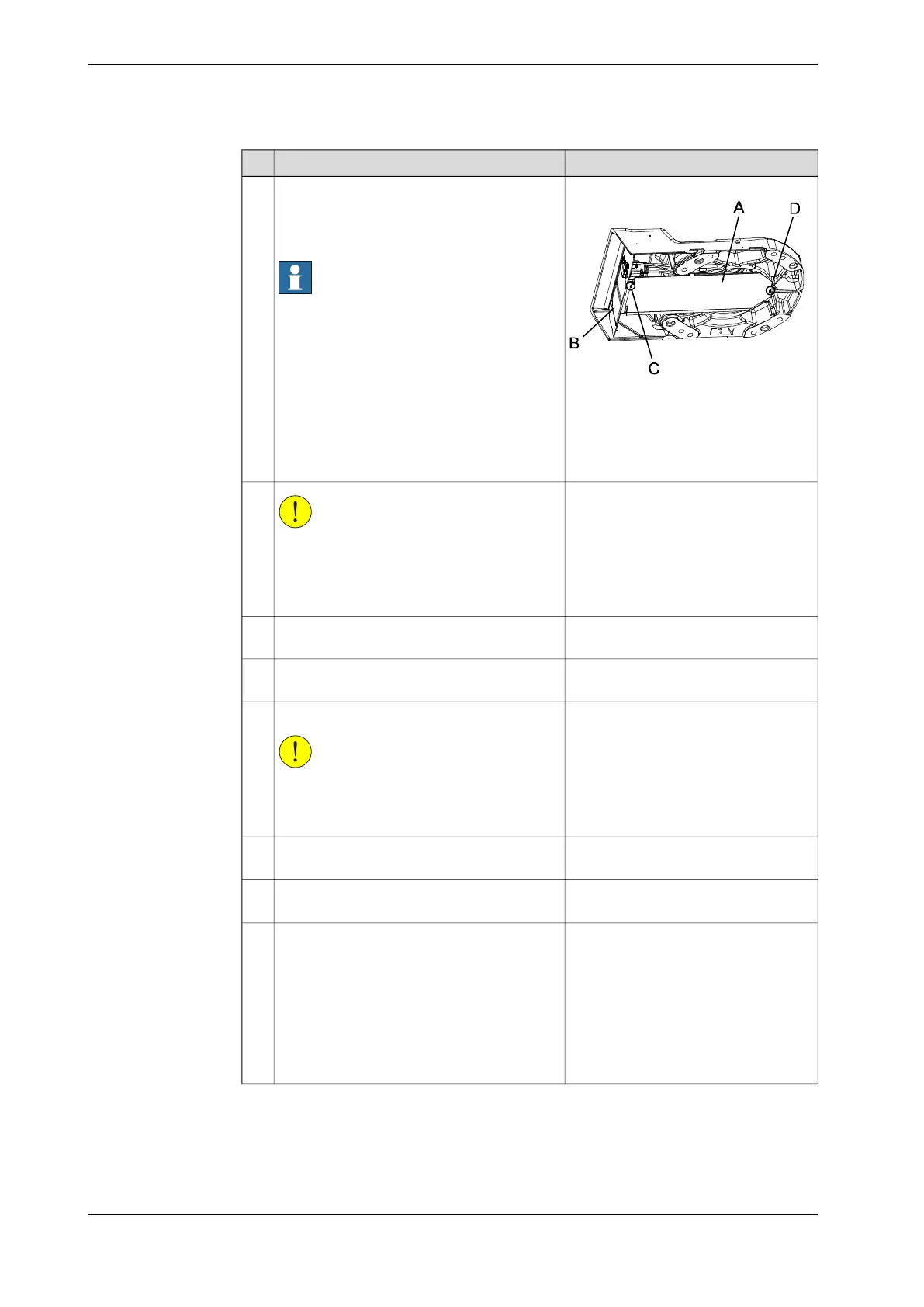
Refit the bottom plate underneath the robot
base by pushing it into the groove and fitting
the attachment screw.
If removed, also refit the rear connector plate.
Note
Direct the bends on the bottom plate down-
wards!
11
• A: Bottom plate
• B: Rear connector plate
• C: Attachment screw
• D: Groove
CAUTION
The base and axis 1 gearbox weighs 310 kg
+ 200 kg.
All lifting accessories used must be sized ac-
cordingly!
12
Lift the robot base and gearbox 1 and remove
the base and gear support.
13
See Orienting and securing the robot
on page 81.
Secure the base to the mounting site.14
Detailed in section Refitting, arm sys-
tem on page 213.
Refit the complete arm system.
CAUTION
This is a complex task to be performed with
utmost care in order to avoid injury or dam-
age!
15
See section Performing a leak-down
test on page 174.
Perform a leak-down test.16
See Changing oil, axis-1 gearbox on
page 146.
Refill the gearbox with oil.17
Pendulum Calibration is described in
Operating manual - Calibration Pendu-
lum, enclosed with the calibration tools.
Recalibrate the robot.18
Axis Calibration is described in Calibrat-
ing with Axis Calibration method on
page 352.
General calibration information is in-
cluded in section Calibration on
page 341.
Continues on next page
322 Product manual - IRB 6660
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
4 Repair
4.7.1 Replacing the axis 1 gearbox
Continued