8 Running a subset of a MultiMove system
8.1. How to continue with one or more drive units inactive.
3HAC021272-001 Revision: H100
© Copyright 2004-2008 ABB. All rights reserved.
NOTE!
Depending on the type of failure, this method may not always succeed. For example if there
is an error in the axis computer. In that case, continue with the alternative configuration.
Continue with alternative configuration
This procedure shows how to let the functional robots continue with their applications but
with changes in the standard configuration.
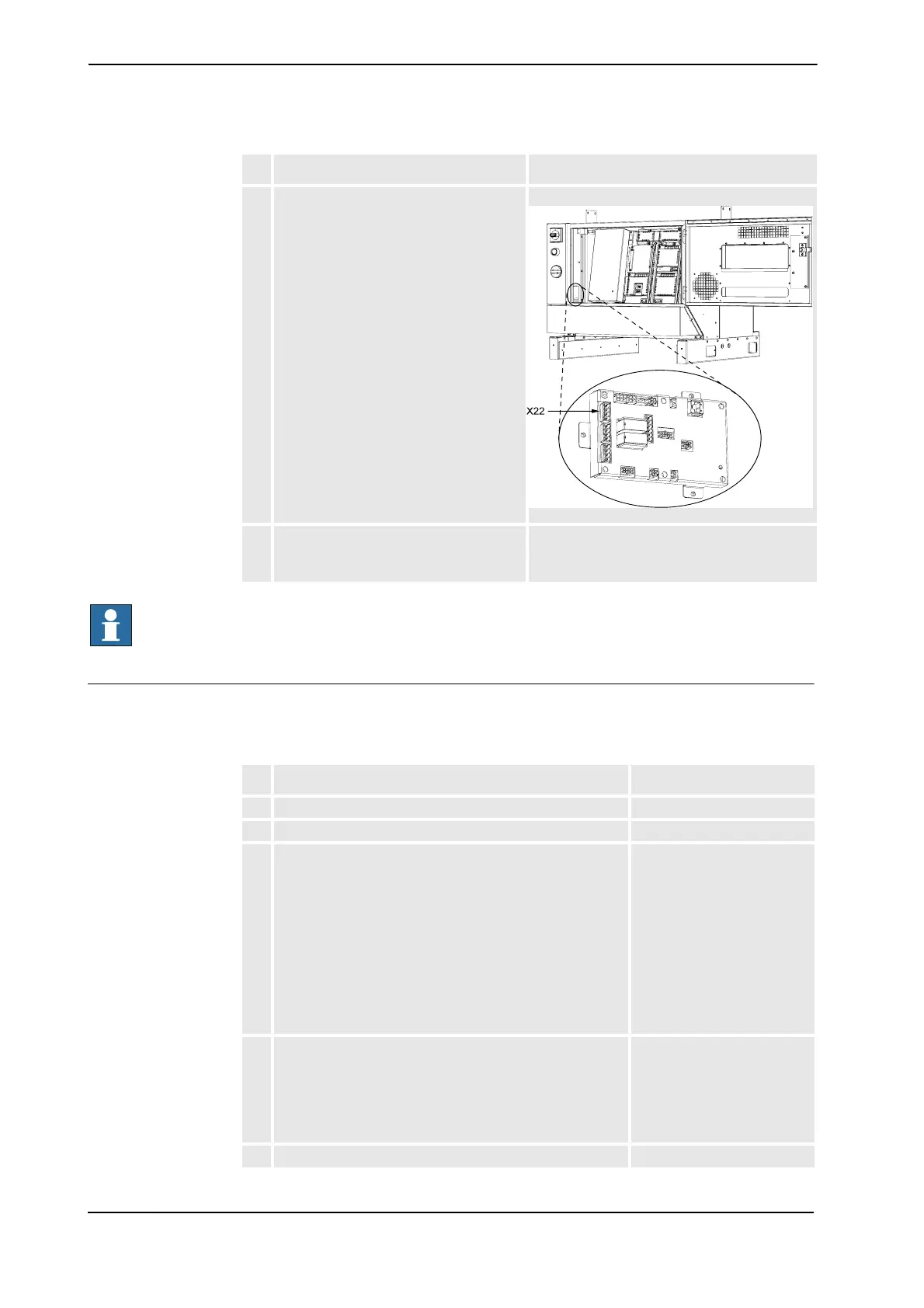
4. Remove the contact from X22 in the
drive module. When the contact is
removed the following message
appears on the Flex Pendant: Event
Message 50320, Drive Module Discon-
nected.
xx0500001599
5. The system now acts as if none of the
mechanical units connected to this drive
module exists.
Action Info/illustration
Action Info/illustration
1. Make an X-start.
2. Switch off the controller.
3. Localize the Ethernet connection cable of the drive
module you wish to disconnect. Remove it from the robot
communication card in the control module.
Note that the Drive module’s ethernet cables should be
connected in the following order. So that there is no gap
in this order:
• AXC1 on the Robot communication card
• ETHERNET 1 on the Ethernet card
• ETHERNET 2 on the Ethernet card
• ETHERNET 3 on the Ethernet card
See Ethernet connections
on page 19.
4. Localize the safety signal connection cable of the drive
module you wish to disconnect. Remove it from the panel
board in the control module and replace it with a jumper
connector. Move the safety signal connection cables so
that there are no gaps in the following order X7, X8, X14
and X17.
See Ethernet connections
on page 19, Safety signal
connections on page 20
5. Switch on the power to the controller.
Continued
Continues on next page