Interpret the Attribute Tables
152 Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
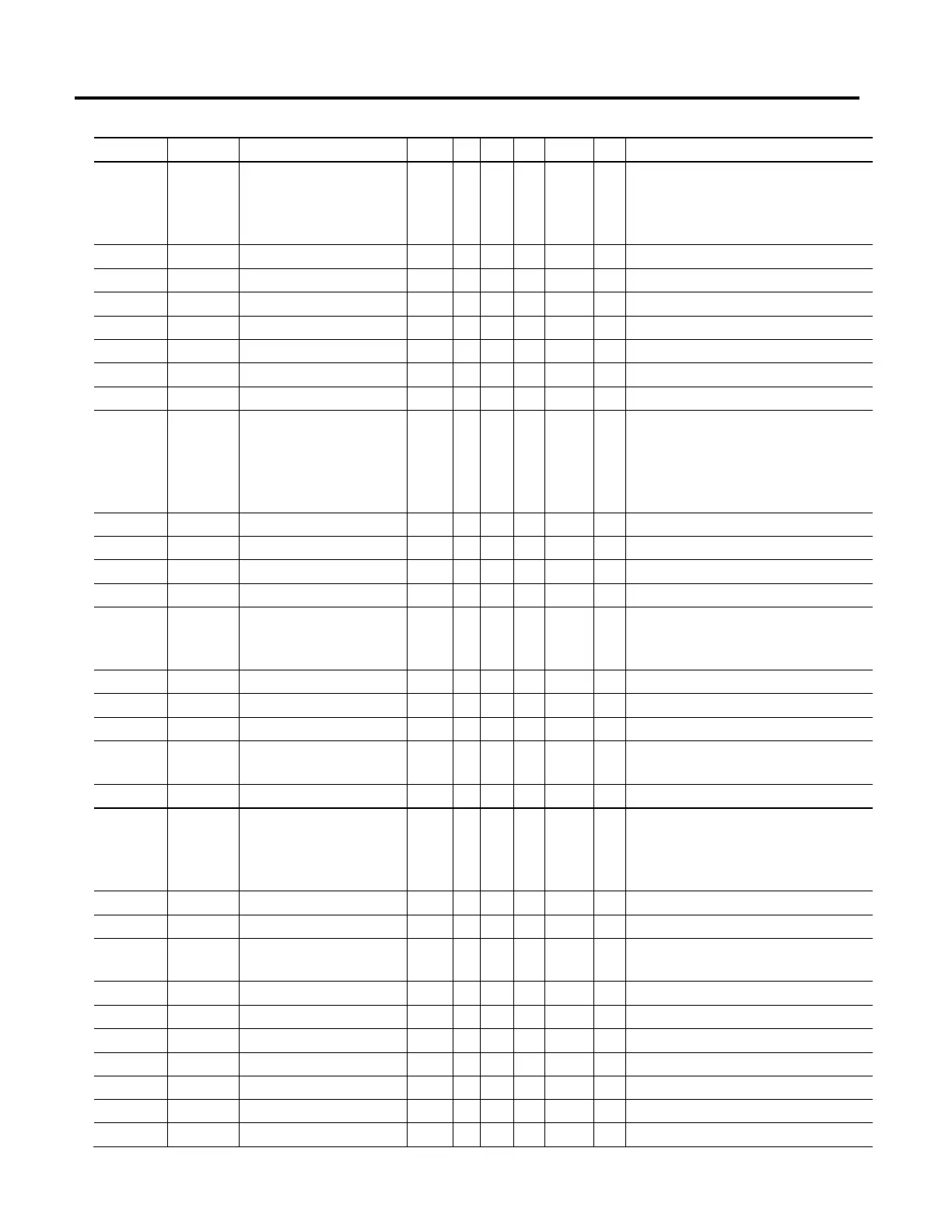
ID Access Rule Attribute Name B E F P V T Conditional Implementation
647 Set Inverter Overload Action - - Y Y Y Y O-Enum
1 = Current Foldback (Y)
128 = Reduce PWM Rate (N)
129 = PWM Foldback (N)
699 Set Inverter Thermal Overload User Limit - - Y Y Y Y
1338 Set Linear Motor Damping Coefficient - - N N N N Linear Motor only
2313 Set Linear Motor Integral Limit Switch - - N N N N Linear Motor only
1336 Set Linear Motor Mass - - N Y Y Y Linear Motor only
1337 Set Linear Motor Max Speed - - N Y Y Y Linear Motor only
801 Get Load Observer Acceleration Estimate - - - Y Y N
806 Set Load Observer Bandwidth - - - Y Y N
805 Set Load Observer Configuration - - - Y Y Y O-Enum
1 = Load Observer Only (Y)
2 = Load Observer With Velocity Estimate (Y)
3 = Velocity Estimate Only (Y)
4 = Acceleration Feedback (N)
809 Set Load Observer Feedback Gain - - - Y Y N
807 Set Load Observer Integrator Bandwidth - - - Y Y N
802 Get Load Observer Torque Estimate - - - Y Y N
1370 Set Load Type - N N N N N DScale
750 Set Local Control N N N N N N O-Enum
1 = Conditionally Allowed (N)
2 = Allowed (N)
614 Set Mechanical Brake Control - - Y Y Y Y
616 Set Mechanical Brake Engage Delay - - Y Y Y Y
615 Set Mechanical Brake Release Delay - - Y Y Y Y
45 Set Motion Scaling Configuration - R R R R R O-Enum
1 = Drive Scaling (N)
1310/251 Set Motor Catalog Number - - N Y Y Y Dr NV
1313 Set Motor Data Source - - R R R R O-Enum
1 = Database (Y)
2 = Drive NV (N)
3 = Motor NV (Y)
1323 Set Motor Integral Thermal Switch - - Y Y Y Y
1324 Set Motor Max Winding Temperature - - Y Y Y Y
646 Set Motor Overload Action - - Y Y Y Y O-Enum
1 = Current Foldback (Y)
1322 Set Motor Overload Limit - - Y Y Y Y
695 Set Motor Overspeed User Limit - - Y Y Y Y
694 Set Motor Phase Loss Limit - - N N N N V26/V27
1317 Set Motor Polarity - - Y Y Y Y
1321 Set Motor Rated Output Power - - Y Y Y Y Y-PM
1320 Set Motor Rated Peak Current - - Y Y Y Y Y-IM
697 Set Motor Thermal Overload User Limit - - Y Y Y Y

 Loading...
Loading...


