Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018 335
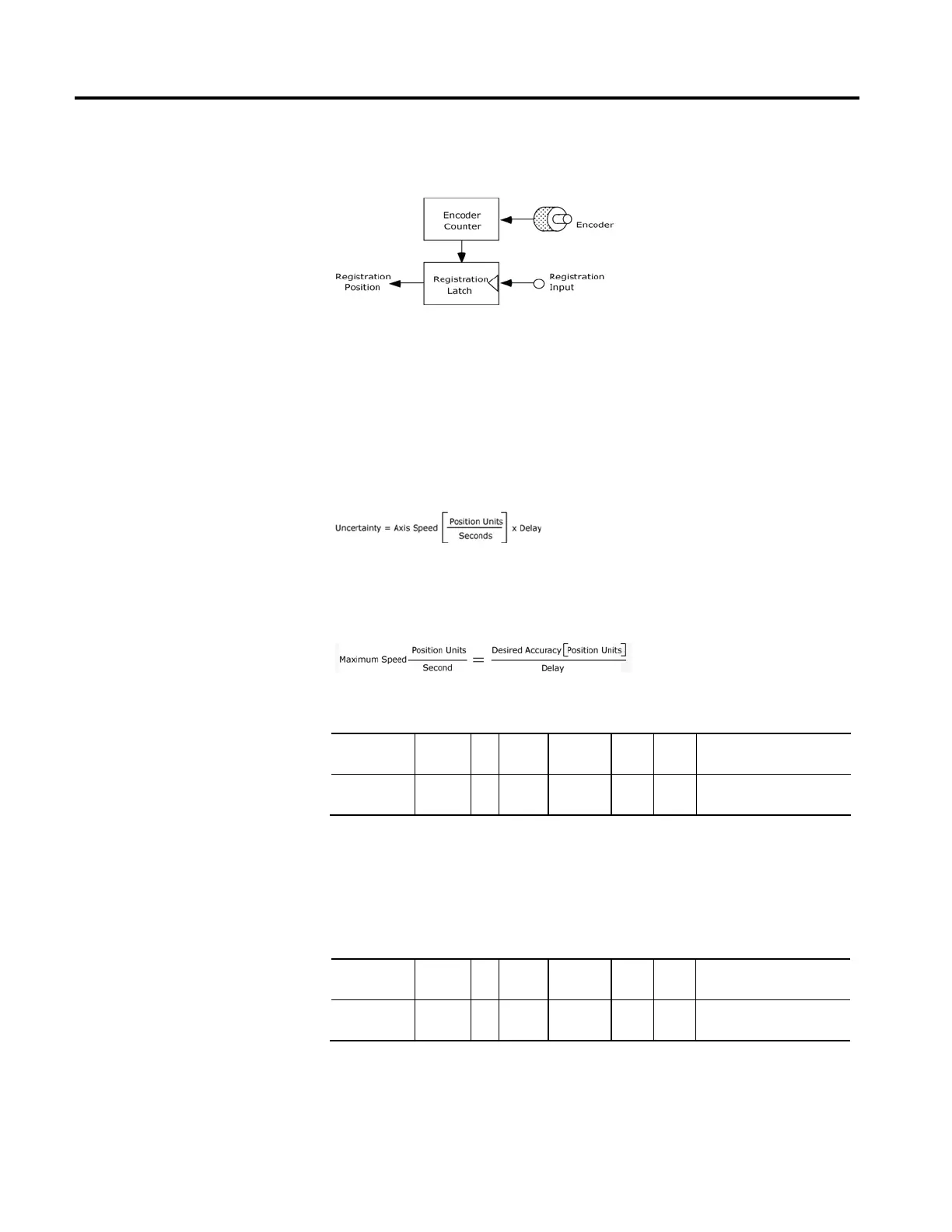
the controller software (soft registration) or, for greater accuracy, in physical
hardware (hard registration).
The Registration Latch mechanism is controlled two Event Control instructions,
MAR (Motion Arm Registration) and MDR (Motion Disarm Registration).
The accuracy of the registration position value, saved as a result of a registration
event, is a function of the delay in recognizing the specified transition (typically 1
µsec for hardware registration) and the speed of the axis during this time. The
uncertainty in the registration position is the distance traveled by the axis during
this interval as shown in this equation:
Use the formula given above to calculate the maximum registration position error
for the expected axis speed. Alternatively, you can calculate the maximum axis
speed for a specified registration accuracy by re-arranging this formula:
Registration 1 Time and Registration 2 Time
Usage Access T Data
Type
Default Min Max Semantics of Values
Required - E
Get/
GSV
T DINT - - - CST time in microseconds
The two Registration Time values contain the lower 32-bits of CST time at which
their respective registration events occurred. Units for this attribute are in
microseconds.
Interpolation Time
Usage Access T Data
Type
Default Min Max Semantics of Values
Required - E
Set/
SSV
T DINT - - - CST time to Interpolation
The Interpolation Time attribute is the 32-bit CST time used to calculate the
interpolated positions. When this attribute is updated with a valid CST value, the
Interpolated Actual Position and Interpolated Command Position values are
automatically calculated.
 Loading...
Loading...




