Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018 457
• B = Converters
• D = Frequency, Position, Velocity, and Torque Control modes
• E = Feedback Only
The enumerations for exceptions is as follows:
• 0 = Ignore (All)
• 1 = Alarm (All)
• 2 = Fault Status Only (B, D)
• 3 = Stop Planner (D)
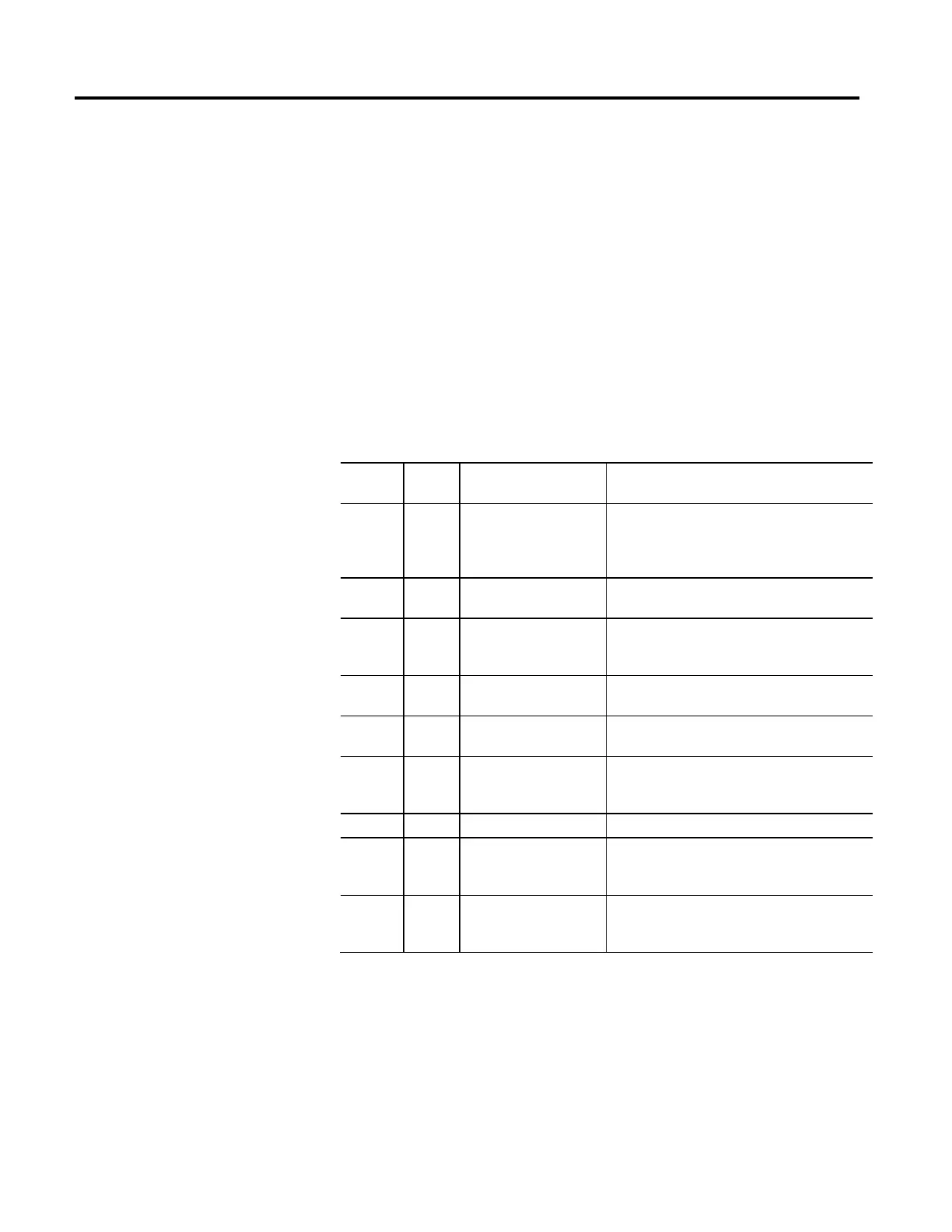
Standard exceptions
Array
Index
Rule Exception Description
0 - Reserved
This bit cannot be used si
nce the alarm codes and fault code
are defined by the associated exception bit number and an
alarm code or fault code of 0 means no alarm or fault
condition is present.
1 D Motor Overcurrent
Motor current has exceeded its rated peak or instantaneous
current limit.
2 D Motor Commutation
Permanent magnet motor commutation problem detected,
such as an illegal state '111' or '000' for UVW commutation
signals, S1, S2, and S3.
3 D Motor Overspeed FL
Motor speed has exceeded the Motor Overspeed Factory
Limit attribute associated with the motor type.
4 D Motor Overspeed UL
Motor speed has exceeded the user-defined speed limit
given by Motor Overspeed User Limit.
5 D Motor Overtemperature FL
Motor temperature has exceeded the Motor
Overtemperature Factory Limit, or the integrated motor
thermal switch has tripped.
6
--Reserved--
7 D Motor Thermal Overload FL
Motor thermal model or I
2
T overload value has exceeded its
factory set thermal capacity limit given by Motor Thermal
Overload Factory Limit.
8 D Motor Thermal Overload UL
Motor thermal model or I
2
T overload value has exceeded its
user-defined thermal capacity given by Motor Thermal
Overload User Limit.

 Loading...
Loading...



