Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019 75
Configure Integrated Motion Control Using Kinetix 5700 Drives Chapter 4
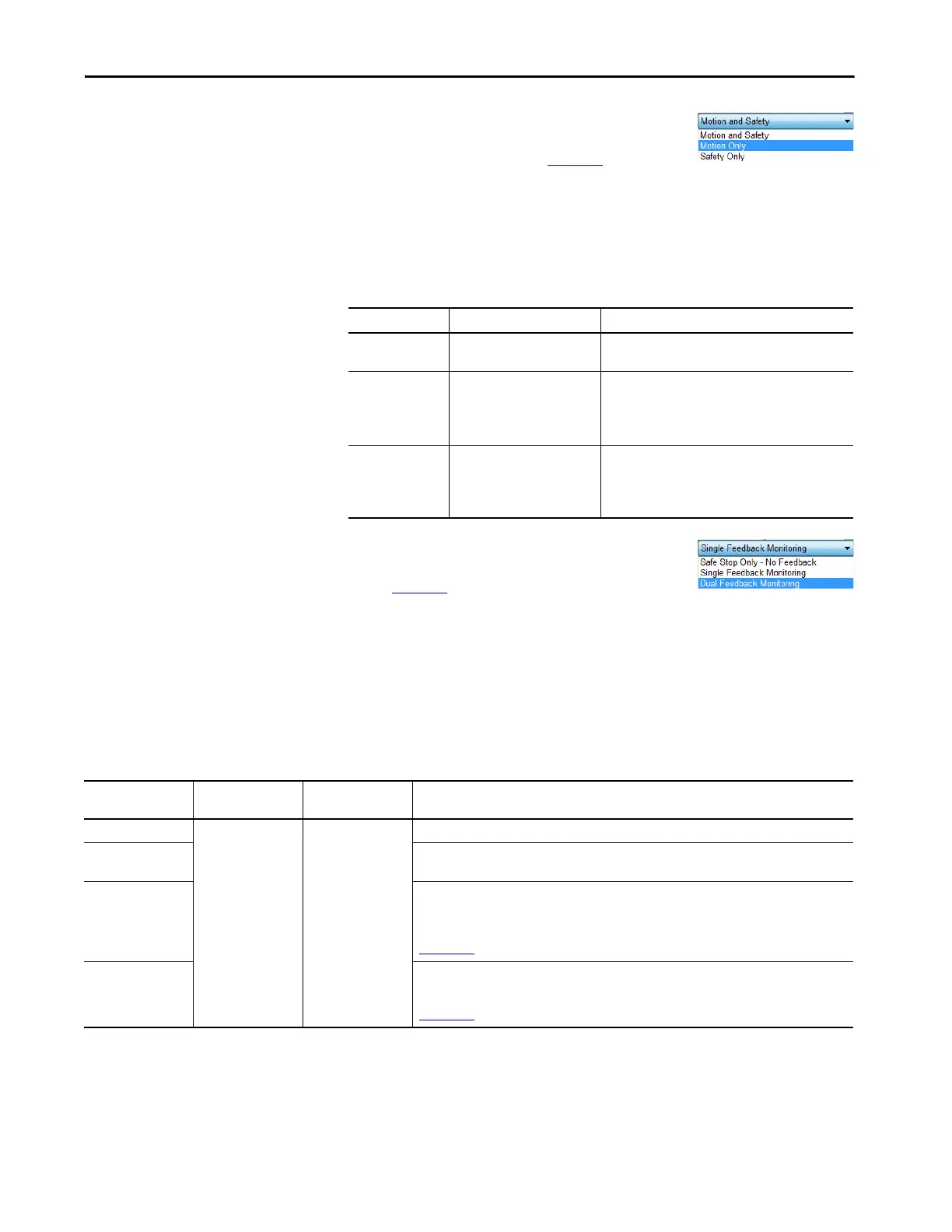
3. From the Connection pull-down menu,
choose the Connection mode for your
motion application (see Table 1 8
for
definitions).
4. From the Motion Safety x pull-down menu,
choose the integrated safety type (see
Table 1 9
for definitions).
'Motion Safety' applies to 2198-Sxxx-ERS4 (single-axis) inverters.
'Motion Safety 1' and 'Motion Safety 2' applies to 2198-Dxxx-ERS4
(dual-axis) inverters.
Motion Safety and Motion Safety 1 align with Axis 1 configured in
Associated Axes. Motion Safety 2 aligns with Axis 3 configured in
Associated Axes.
Table 19 - Motion Safety Definitions
TIP When ‘Safety’ appears in the Connection mode, integrated safety is
implied.
Table 18 - Module Connection Definitions
Connection Mode Safety Options Description
Motion and Safety Integrated mode This controller manages the motion connections and
integrated STO.
Motion Only • Hard-wired STO mode
• Integrated mode if there is a
secondary safety controller
• This controller manages the motion connections.
• The hard-wired safety inputs control the hard-wired
STO. Another controller that has a Safety-only
connection to the drive manages the integrated STO.
Safety Only Integrated mode • This controller manages the integrated STO.
• Another controller that has a Motion-only
connection to the drive manages the motion
connections.
Motion Safety Mode
Safety Application
Mode
Module Connection
Options
Description
STO Only
Networked
• Motion and Safety
•Safety Only
2198-xxxx-ERS3 (series A and B): STO function only.
Safe Stop Only -
No Feedback
• 2198-xxxx-ERS4: STO function and Timed SS1 safe stop functions are available.
• 2198-xxxx-ERS3 (series B): STO function and Timed SS1 safe stop functions are available.
Single Feedback
Monitoring
Primary feedback is used in the safety object for safe monitoring. The feedback can be a SIL rated
Hiperface DSL encoder, for example, a VPL-B1003P-Q or W motor used in the DSL Feedback port. This
can also be a Sine/Cosine or EnDat device, for example, an MPL-B310P-M motor used in the Universal
Feedback port. See the Kinetix 5700 Safe Monitor Functions Safety Reference Manual, publication
2198-RM001
, to evaluate SIL levels possible with one feedback device.
Dual Feedback
Monitoring
In addition to primary feedback, an external feedback device is used to improve SIL levels. For
example, the Bulletin 842HR type encoder can be used in the Universal Feedback port as a Sine/
Cosine device. See the Kinetix 5700 Safe Monitor Functions Safety Reference Manual, publication
2198-RM001
, to evaluate SIL levels possible with two feedback devices.

 Loading...
Loading...












