14 français
6
InterfaceP
6.1 Principe
L’interfaceP est une interface universelle à impulsion alliant
les fonctions des cadences croissante et décroissante. La
commande de mesure de déplacement du système a lieu
par Init ainsi que par des signaux démarrage/arrêt. Ce
faisant, l’impulsion de démarrage représente le point de
référence pour la mesure de la durée de propagation.
La transmission sécurisée des signaux, même pour des
longueurs de câble atteignant 500m entre l’unité d’analyse
et le capteur de déplacement, est garantie par un pilote et
un récepteur différentielRS485 particulièrement résistant
au brouillage. Les signaux de brouillage sont efficacement
supprimés.
Les protocolesDPI et IP sont destinés à la transmission
directe des données entre la commande et le capteur de
déplacement. Ce faisant, les informations telles que
fabricant, type de capteur, longueur de mesure et vitesse
du guide d’ondes sont transmises par les câbles de signal.
Cela permet une mise en service et/ou le remplacement
d’un capteur de déplacement sans modification manuelle
des paramètres de commande.
L’interface permet une communication bidirectionnelle et
contient des fonctions de diagnostic intégrées. Le principe
PlugandPlay ainsi que le paramétrage automatique
réduisent les temps d’arrêt.
6.2 ProcédésDPI/IP
6.2.1 Fonction et caractéristiques
Les procédésDPI/IP contiennent deux modes de
fonctionnement, le mode de mesureDPI et le mode de
fonctionnement avec le protocole de donnéesIP.
DPI = digital pulse interface
IP = integrated protocol
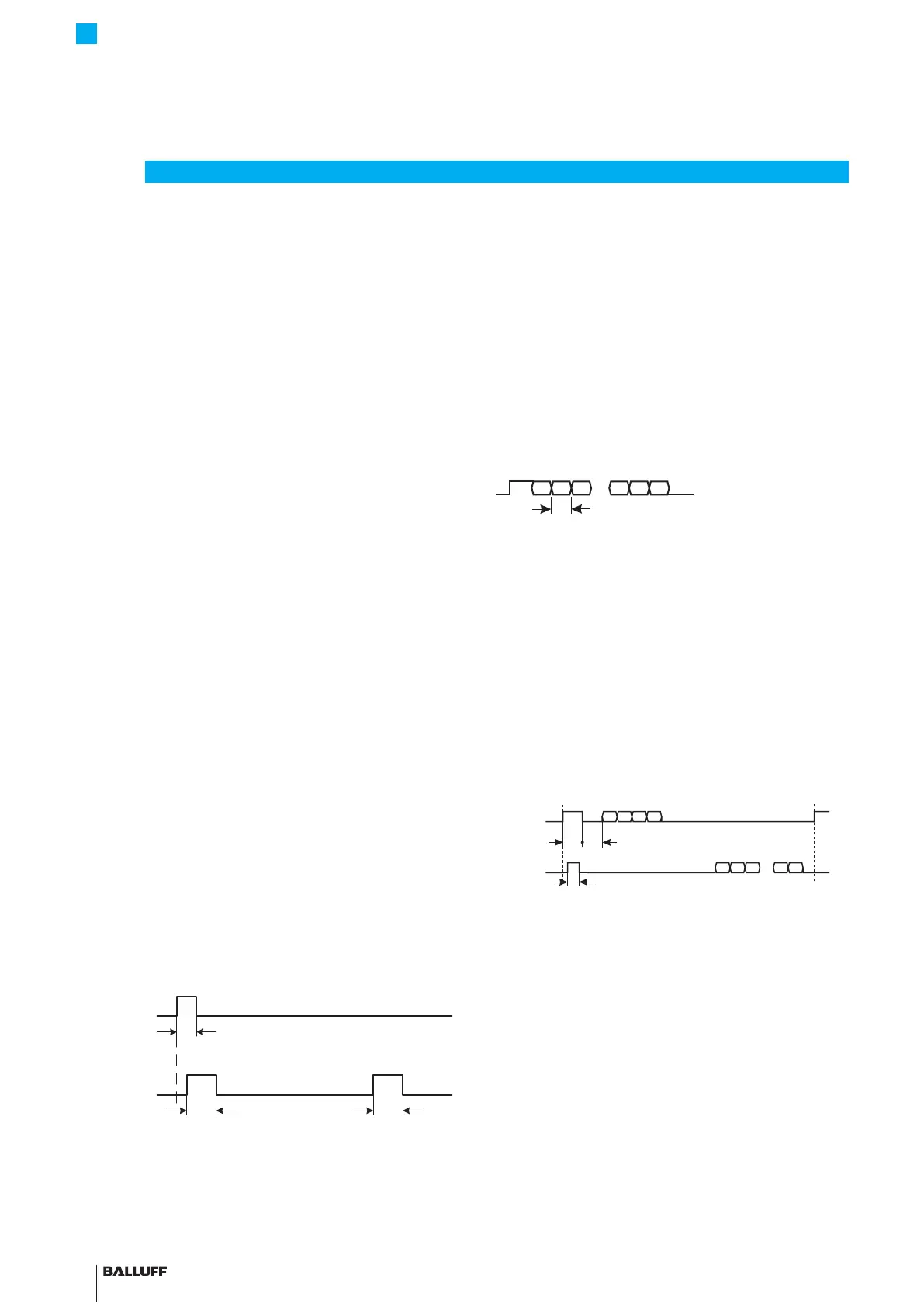
Mode de mesureDPI
L’impulsionInit est envoyée au capteur de déplacement à
intervalle régulier sur le câbleInit. La cadence croissante
du capteur déclenche alors une mesure.
Fig. 6-1 :
T
Init
T
T
Init
Start/Stop
Principe de transmission de données en mode de mesure DPI
T
Init
De 1 à5μs
T
Start
De 3 à 5μs (typ. 4µs)
T
Stop
De 3 à 5μs (typ. 4µs)
Fonctionnement avec le protocole de donnéesIP
En augmentant la longueur de l’impulsionInit T
IP
de 10 à
50μs, le capteur de position commute du mode de
mesureDPI au fonctionnement avec protocole de
donnéesIP (voir Fig. 6-2).
Ce faisant, une chaîne de caractères (Command) est
transmise au capteur de déplacement à titre d’ordre après
l’impulsionInit. Sur le câble démarrage/arrêt, l’impulsion
de démarrage est certes envoyée au capteur de
déplacement en tant que réponse, mais au lieu des
impulsions d’arrêt, une chaîne de caractères (Response)
contenant la réponse demandée et dépendante de la
commande est transmise à la commande.
Chaque caractère du protocole de transmission possède
la structure binaire suivante:
Start Bit0 Bit1 Bit2 Bit6 Bit7 PBit Stop
T
Bit de démarrage Bit Start of Frame
Bit0…Bit7 8bits de données
BitP Bitde parité (Evenparity)
Arrêt BitStop of Frame
T
Bit
4μs (longueur de bit pour un débit
de données de 250kbit/s)
Lors de la transmission de la chaîne de caractères, la
sécurité des données est assurée par le contrôle de parité
et le contrôleCRC16 à l’aide du polynômeX16+X12+X5+1
(correspond à 0x1021). En cas d’erreur de transmission ou
de protocole, un message d’erreur correspondant est
envoyée par le capteur de déplacement à titre de réponse.
Fig. 6-2 :
T
D1
Response
T
IP
T
Init
p
…
Principe de transmission des données pour le protocole de
donnéesIP
T
IP
De 10 à 50μs
Fonctionnement avec le protocole de
donnéesIP
Command Commande pour la demande des
données du capteur de déplacement
(ces informations sont enregistrées
dans le capteur de déplacement)
T
Start
De 3 à 5μs (typ. 4µs)
T
D1
>50μs
Response Réponse correspondant à la demande
Alternative: message d’erreur
BTL7-P511 -M ____ -P-S32/S115/KA_ _
Capteur de déplacement Micropulse en boîtier profilé
 Loading...
Loading...








