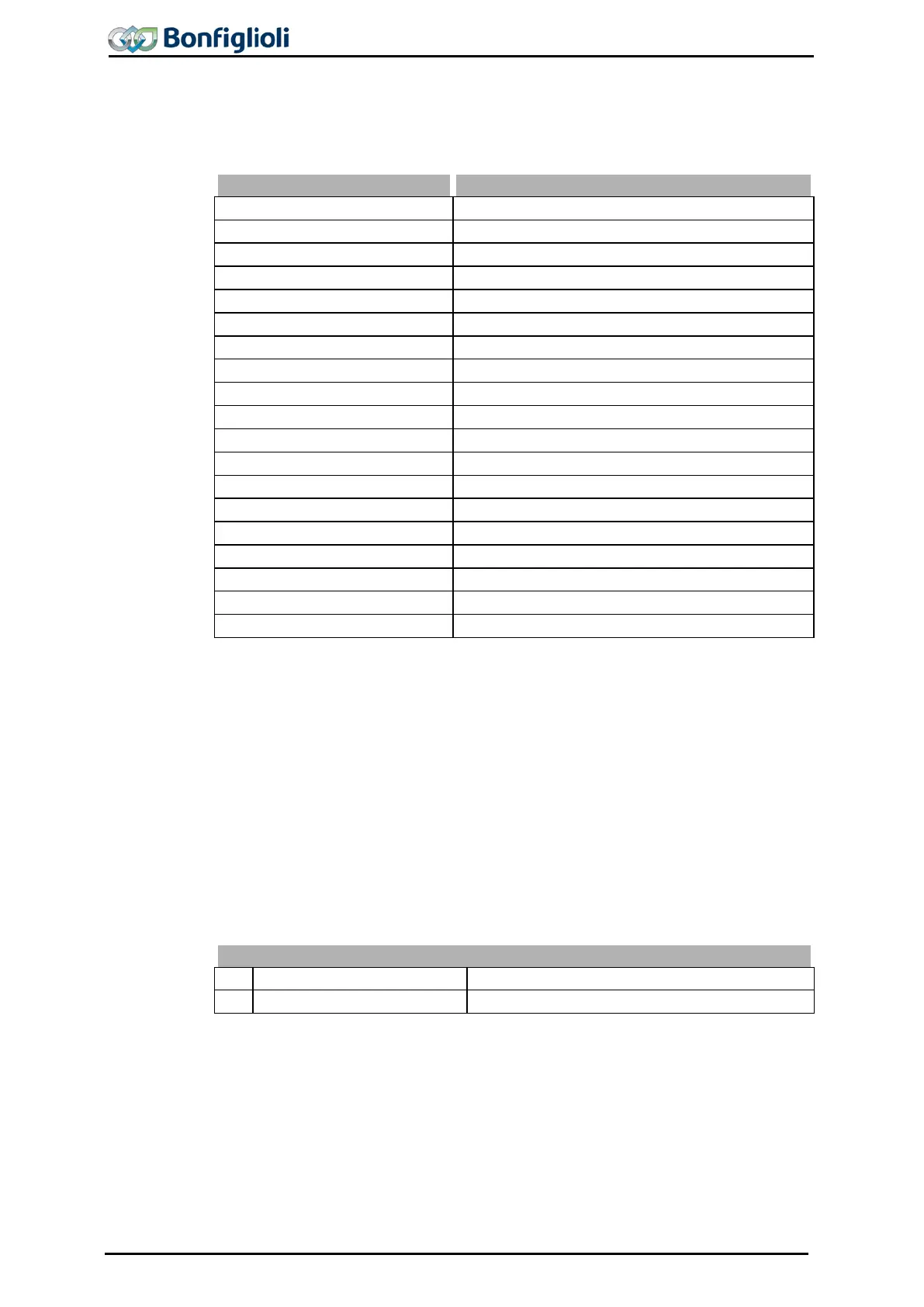
The Reset memory 237 parameter to be selected in the PARA menu branch of the
operating unit enables purposeful resetting o
f the individual mean and peak values.
The peak value and the mean value with the values stored in the period are over-
written with the parameter value zero.
Values of actual value memory remain unchanged.
Reset Peak value long-term Ixt 231.
Peak Value Short Term Ixt
Reset Peak value short-term Ixt 232.
3 -
Peak Value Vdc
Reset
287.
4 -
Average Value Vdc
Delete
288
.
5 -
Peak Value Tc
Reset
289.
6 -
Average Value Tc
Delete
290.
Reset
291.
Delete
292.
9 -
Peak Value Iabs.
Reset
.
10 -
Average Value Iabs
Delete
.
11 -
Peak Value Pactive pos.
Reset
Peak value active power pos. 295
.
12 -
Peak Value Pactive neg.
Reset
Peak value active power neg. 296
.
13 -
Average Value Pactive
Delete
Average value active power
.
16 -
Energy, positive
Reset parameter
.
17 -
Energy, negative
Reset parameter Energy negative 302.
100 -
All Peak Values Reset all peak values stored.
Delete average values and stored values.
Delete the entire actual value memory.
19.4 Actual Values of the System
The calculation of the actual figures of the system is based on the parameterized
system data. Specific to the application, the parameters are calculated from the fac-
tors, electrical variables and the controls. The correct display of the actual figures is a
function of the data of the system to be parameterized.
19.4.1 Actual System Value
The drive can be monitored via the actual value Actual System Value 242.
The Actual frequency 241 to be monitored is multiplied by the
factor 389 and can be read out via the parameter Actual system value 242, i.e. Ac-
tual frequency 241 x Actual system value factor 389 = Actual system value 242.
Calculated frequency of drive.
262 Operating Instructions ACU 06/13

 Loading...
Loading...