UD70
Issue code: 70nu2
8-4 Features
8.4 Position
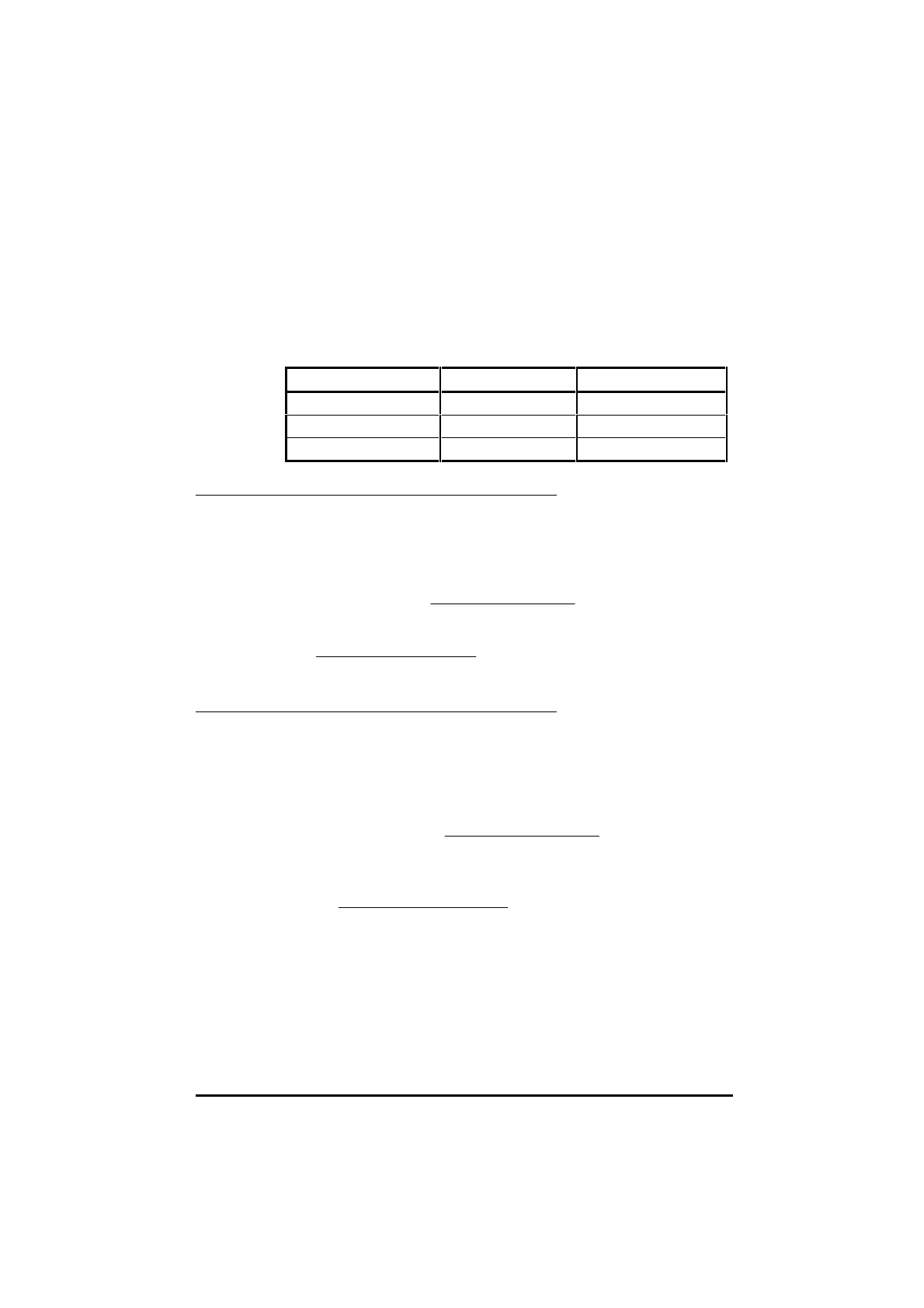
Position values are absolute positions referenced from the power-up
position. The position is measured in encoder lines where the number of
lines per revolution = 4 * encoder pulses per revolution. With a resolver, the
simulated encoder pulses per revolution depends on the maximum drive
speed (#1.06).
Maximum Speed (#1.06) Resolver resolution
0 - 3000 rpm 14 bit
3001 - 12000 rpm 12 bit
12001 - 30000 rpm 10 bit
Velocity
The maximum velocity or speed will be specified for the overall system, and
can be converted to the equivalent motor speed, N, in rpm.
To convert between the specified speed (N) and encoder lines per sec, use
the following equations:
lines per ond
N encoder ppr
sec
**
==
4
60
N
lines per ond
encoder ppr
==
sec *
*
60
4
Acceleration
For any axis on a particular machine, the maximum rate of acceleration or
deceleration will be specified. The minimum time (t
min
) to go from zero to N
rpm can be calculated, and converted to equivalent changes in motor rpm.
To convert between the specified values (t
min
and N) and encoder lines per
sec
2
, use the following equations:
lines per second
N * encoder ppr * 4
t * 60
2
min
==
t
N * encoder ppr * 4
lines per second * 60
min
2
==
When S-ramps are used, calculate the ramp rates as for a normal linear ramp.
The S-ramp for that setting will take the same period of time, but will
produce a higher peak acceleration. (See _Q13%).
NOTE: the units for Unidrive ramps have no effect on these calculations, as
the internal ramps should be disabled. All profile ramps are generated and
controlled by the position controller itself.