UD70
Issue code: 70nu2
Features 8-5
8.5 Enabling the position controller
The position controller must be enabled by setting #17.12.
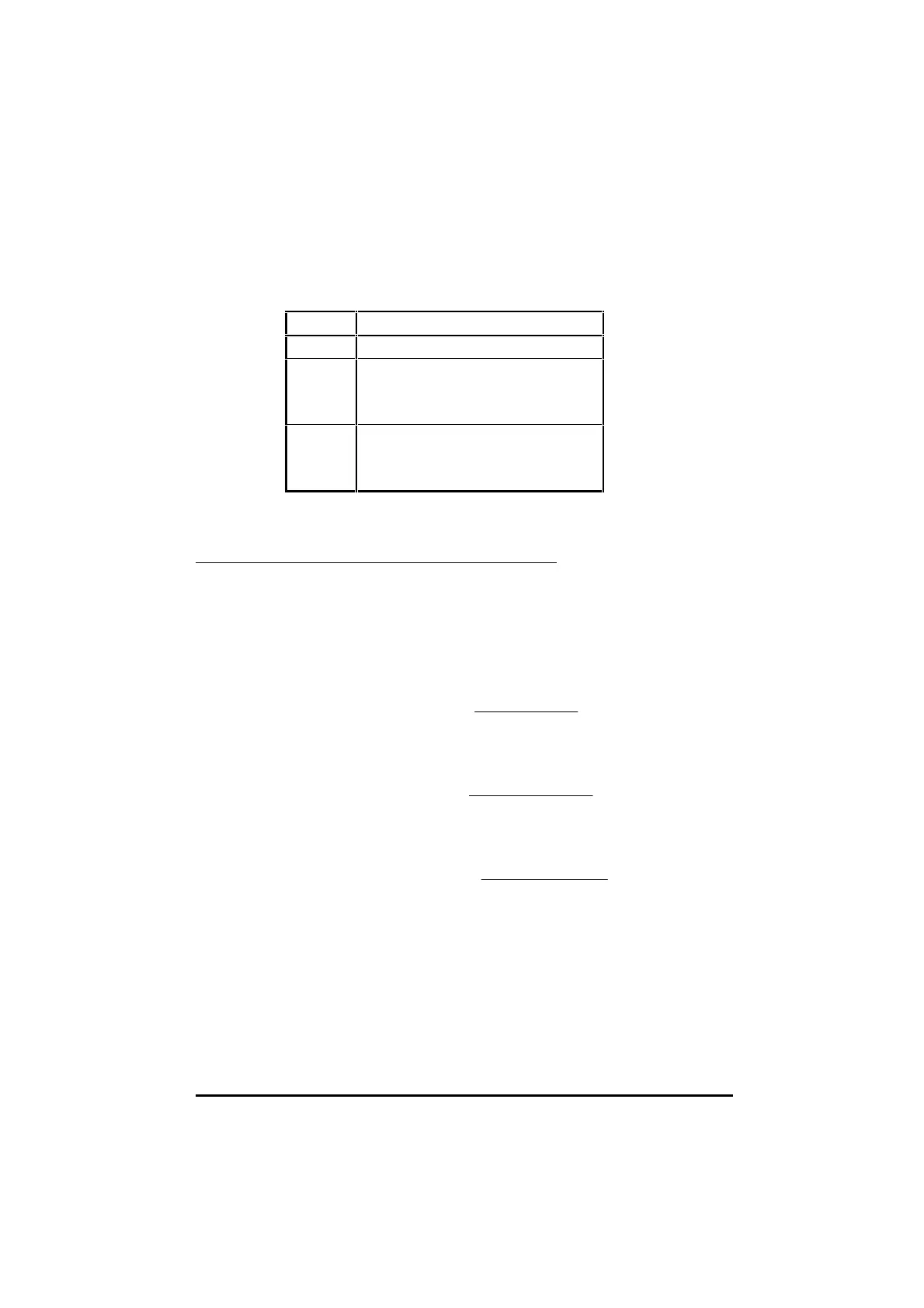
#17.12 Position Loop
0 Disabled
1 Synchronous with ENCODER task
5.52ms (3, 6 or 12kHz switching frequency)
7.36ms (4.5 or 9kHz switching frequency)
2 Synchronous with SPEED task
1.38ms (3, 6 or 12kHz switching frequency)
1.84ms (4.5 or 9kHz switching frequency)
The REINIT command does not read #17.12. To disable the position
controller while the Drive is running, set _Q20%.31 to 1.
Example calculations
The position loop is to be used to run the motor at a maximum of 2700rpm,
with 300rpm headroom allowed for position recovery. The feedback device
from the motor is a 1024 pulse per revolution encoder. The minimum linear
acceleration time for the machine axis is 0.6 seconds go from zero to 2700
rpm.
Maximum speed,
_Q14%
Lines per second
2700 *1024 *4
60
184320====
Digital Lock Speed, _Q15%
Lines per second
3000 * 1024 * 4
60
204800====
Acceleration rate _Q12%
Lines per second
2
2700 * 1024 * 4
0.6 * 60
307200====
The settings for the position loop speed and acceleration parameters would be:
__Q14% = 184320 maximum speed during position profile.
_Q15% = 204800 maximum digital lock speed. This provides
300rpm headroom to recover position lost
during acceleration.
_Q12% = 307200 rate of acceleration.
_Q13% = _Q12% set acceleration and deceleration rates to the
same value.