2 — INSTALLATION AND WIRING
Curtis AC F4-A Motor Controller – August 2020 Return to TOC
pg. 22
Motor Position Sensor Inputs
e F4-A is designed to control AC induction (ACIM) and (rotor) Surface Permanent Magnet
Synchronous Motor (SPMSM)
1
traction motors. To accomplish this, the rotor position inputs accept
two types of sensors.
• Quadrature Encoders with Open Collector outputs.
• Sine/Cosine Position sensors.
When congured as a digital Quadrature Encoder, the input is a 5kΩ pull-up resistor to +5 V.
When congured as a Sine/Cosine Analog Encoder, the inputs are setup as analog inputs. ese
sinusoidal analog signals are mathematically converted to rotor position.
In all cases, connect the sensor to the controller’s I/O ground (pins 7 or 18). is is the signals’ reference.
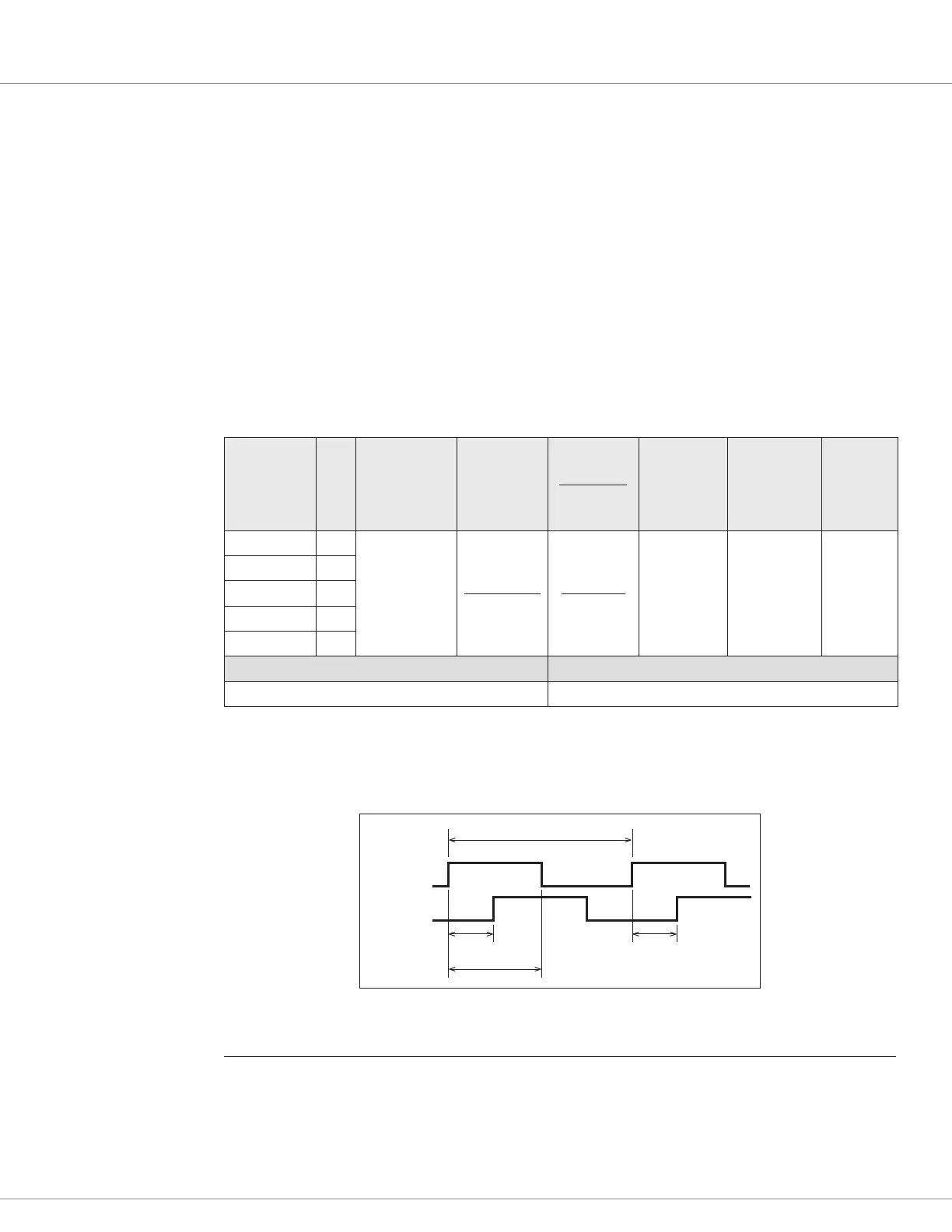
Table 12 Digital/Quadrature Encoder Electrical Specifications
Signal
Name
Pin
Input Voltage
range
High/Low
Voltage
Threshold
Pull-up
Resistance
Input
Impedance
Maximum
Frequency
A-B Phase
Range
Phase Duty
Cycle
Enc 1A 31
0 – 15 V
4 V max
Rising-edge
1 V min
Falling-edge
2k Ω to 5 k
5k Ω
30k Hz 90° ± 30°
50 % ±
10 %
Enc 1B 32
Enc 1C
2
11
Enc 2A 12
Enc 2B 14
VCL Functions VCL Monitor Variables
Motor_RPM
The application must maintain these illustrated signal tolerances throughout the application’s
operating conditions, including voltage, temperature, speed and torque ranges. ACIM applications
use the quadrature encoder.
Channel A
Channel B
360
°
electrical (1 cycle)
>10 μs90
°
±30
°
180
°
±18
°
1
The SPMSM motor option is not operational in cdev 2.4.x.x.
2
Specialty Input (future).
 Loading...
Loading...




