4 — PROGRAMMABLE PARAMETERS
Curtis AC F4-A Motor Controller – August 2020 Return to TOC
pg. 30
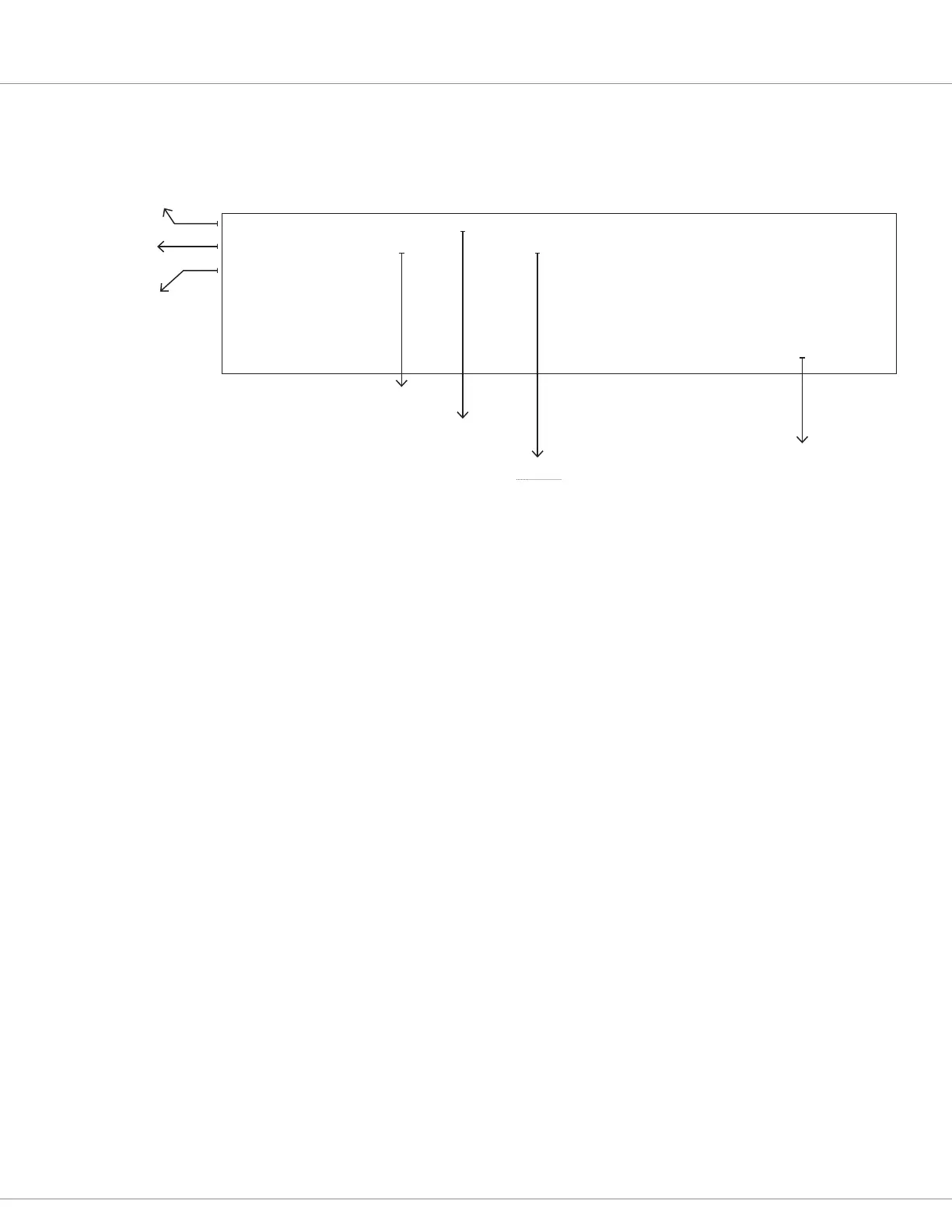
MENU CHART FORMAT
Each parameter has a detailed chart ranging from the display name to a detailed description.
Max Speed 100 – 8000 rpm 4000 rpm
[PCF]
Denes the maximum allowed motor rpm at full throttle.
Partially-applied throttle is scaled proportionately; e.g.
40 % applied throttle corresponds to a request for 40 %
of the set Max Speed Value.
Note:
• The maximum motor rpm is subject to constraints
outlined in the manual (see Motor Speed Constraints).
• If Max_Speed_SpdM is set ≤10 rpm (through VCL)
the throttle request is zeroed.
Max_Speed_SpdM 100 – 8000
0x383A 0x00
Parameter name
as it appears in the
Programmer
VCL Parameter_
Name
CAN Object index
and sub-index
Allowable range
in VCL units.
Allowable range in the
Programmer’s units
Description of parameter’s function and,
where applicable, suggestions for setting it.
Default value
PCF parameter
TERMINOLOGY
When setting parameters and commissioning the vehicle, follow these denitions.
CiA/CANopen CAN in Automation (CiA) is the international users’ and manufacturers’
group for the Controller Area Network (CAN), internationally
standardized in the ISO 11898 series. CANopen is a CAN-based
communication system. e CANopen design was originally for motion-
oriented machine control systems, such as factory handling systems.
Today, CANopen sees usage in various application elds, such as medical
equipment, o-road vehicles, maritime electronics, railway applications,
or building automation. References include CiA 301, 303-1, etc.
Curtis Integrated
Toolkit
e Curtis Integrated Toolkit
TM
(CIT) is a Curtis Instruments developed
soware program for conguring and communicating with Curtis
Instruments products. Use CIT to program (change and edit parameters,
etc.) the Controller. See Appendix D for programming, monitoring, and
diagnostic soware and toolsets.
F2-C e AC F2-C motor controller combines AC traction motor control
with DC pump motor control. Advanced motor drive soware provides
smooth control over full speed and torque, including regenerative
braking and zero speed control. It uses the CANopen standard for
communication and programming.
I/O Input/Output. I/O generally refers to the controller 35-pin AMPSEAL
connector’s input signals or switches, output signals, power, or low-
side drivers.
 Loading...
Loading...




