1-41 Motor Angle Offset
Range: Function:
0
*
[0 - 65535] Enter the correct offset angle between the PM motor and the
index position (single-turn) of the attached encoder or resolver.
The value range of 0 – 65535 corresponds to 0 - 2 * pi (radians).
To obtain the offset angle value: After drive start-up apply DC-
hold and enter the value of par. 16-20
Motor Angle
into this
parameter.
This parameter is only active when par. 1-10
Motor construc-
tion
is set to
PM, non-salient SPM
[1] (Permanent Magnet Mo-
tor).
2.4.5. 1-5* Load Indep. Setting
Parameters for setting the load-independent motor settings.
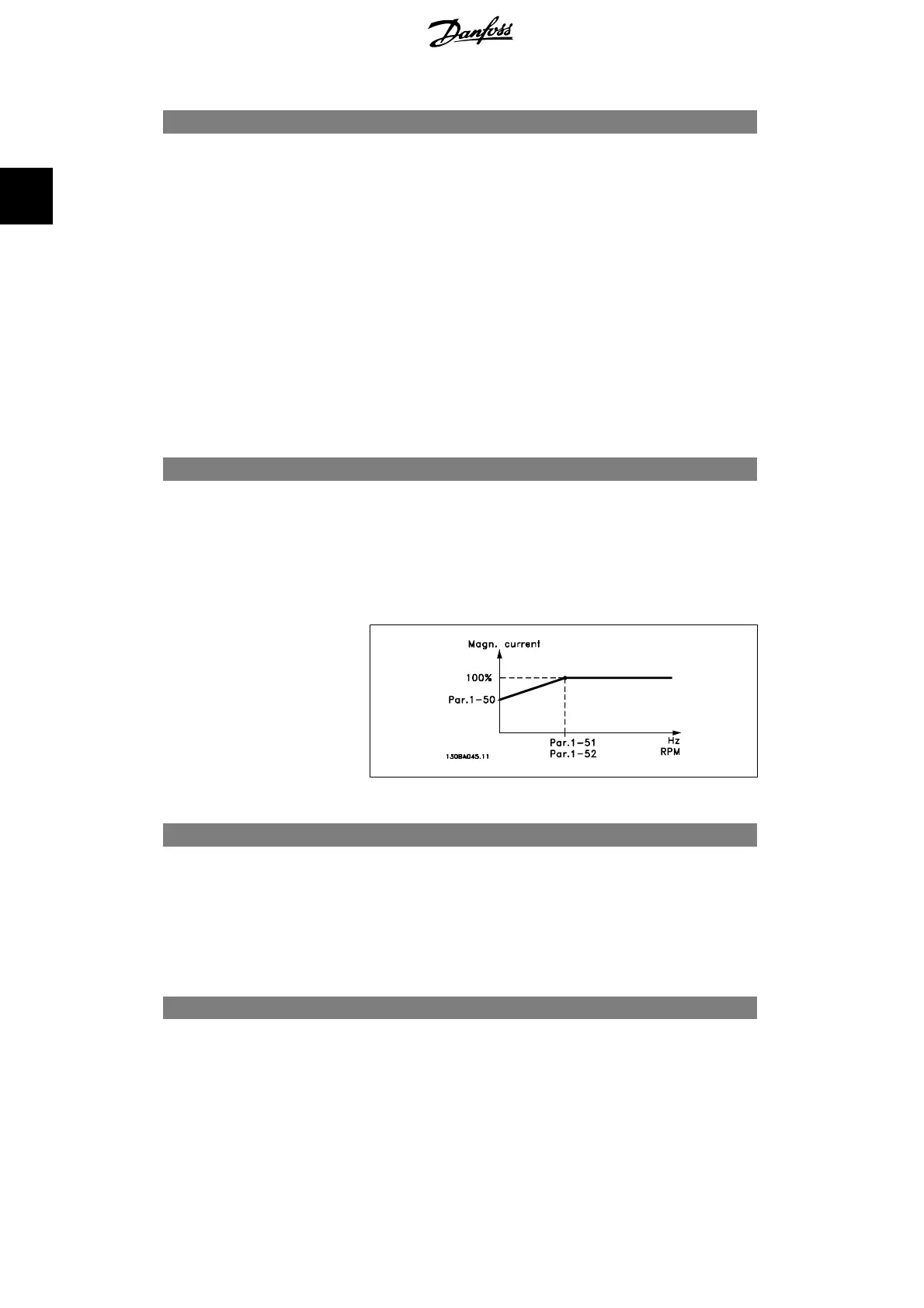
1-50 Motor Magnetisation at Zero Speed
Range: Function:
100% [0 - 300 %] Use this par. along with par. 1-51
Min Speed Normal Magnetis-
ing [RPM]
to obtain a different thermal load on the motor when
running at low speed.
Enter a value which is a percentage of the rated magnetizing
current. If the setting is too low, the torque on the motor shaft
may be reduced.
1-51 Min Speed Normal Magnetising [RPM]
Range: Function:
15
RPM
*
[10 - 300 RPM] Set the required speed for normal magnetising current. If the
speed is set lower than the motor slip speed, par. 1-50
Motor
Magnetisation at Zero Speed
and par. 1-51 are of no signifi-
cance.
Use this par. along with par. 1-50. See drawing for par. 1-50.
1-52 Min Speed Normal Magnetising [Hz]
Option: Function:
[Size re-
lated]
0 - 250 Hz Set the required frequency for normal magnetising current. If
the frequency is set lower than the motor slip frequency, par.
1-50
Motor Magnetisation at Zero Speed
is inactive.
Use this par. along with par. 1-50. See drawing for par. 1-50.
2. How to Programme FC 300 Programming Guide
50
MG.33.M2.02 - VLT
®
is a registered Danfoss trademark
2

 Loading...
Loading...











