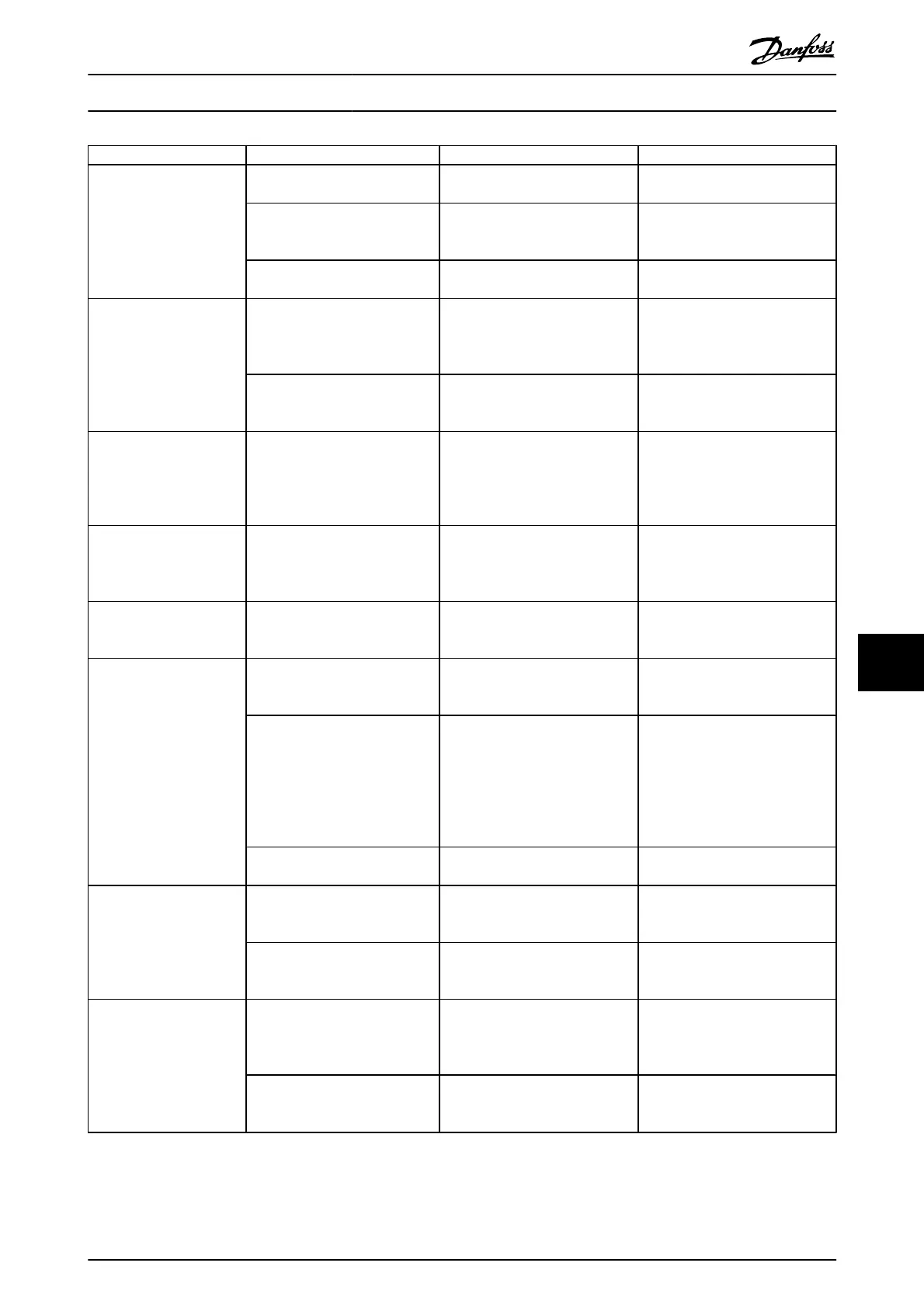
Symptom Possible Cause Test Solution
Motor running in wrong
direction
Motor rotation limit Check that 4-10 Motor sped direction
is programmed correctly.
Program correct settings.
Active reversing signal Check if a reversing command is
programmed for the terminal in
parameter group5-1* Digital inputs.
Deactivate reversing signal.
Wrong motor phase connection See 3.5 Check Motor Rotation in this
manual.
Motor is not reaching
maximum speed
Frequency limits set wrong Check output limits in 4-13 Motor
speed high limit [RPM], 4-14 Motor
speed high limit [Hz], and 4-19 Max
output frequency.
Program correct limits.
Reference input signal not scaled
correctly
Check reference input signal scaling
in 6-* Analog I/O mode and
parameter group3-1* References.
Program correct settings.
Motor speed unstable
Possible incorrect parameter
settings
Check the settings of all motor
parameters, including all motor
compensation settings. For closed
loop operation, check PID settings.
Check settings in parameter
group1-6* Analog I/O mode. For
closed loop operation check
settings in parameter group 20-0*
Feedback.
Motor runs rough
Possible over-magnetization Check for incorrect motor settings in
all motor parameters.
Check motor settings in parameter
groups 1-2* Motor data, 1-3* Adv
motor data, and 1-5* Load indep.
setting.
Motor will not brake
Possible incorrect settings in the
brake parameters. Possible too
short ramp down times.
Check brake parameters. Check
ramp time settings.
Check parameter group2-0* DC
brake and 3-0* Reference limits.
Open power fuses or circuit
breaker trip
Phase to phase short Motor or panel has a short phase to
phase. Check motor and panel
phase to for shorts.
Eliminate any shorts detected.
Motor overload Motor is overloaded for the
application.
Perform startup test and verify
motor current is within specifi-
cations. If motor current is
exceeding nameplate full load
current, motor may run only with
reduced load. Review the specifi-
cations for the application.
Loose connections Perform pre-startup check for loose
connections.
Tighten loose connections.
Mains current imbalance
greater than 3%
Problem with mains power (See
Alarm 4 Mains phase loss
description)
Rotate input power leads into the
drive one position: A to B, B to C, C
to A.
If imbalanced leg follows the wire, it
is a power problem. Check mains
power supply.
Problem with the frequency
converter unit
Rotate input power leads into the
frequency converter one position: A
to B, B to C, C to A.
If imbalance leg stays on same input
terminal, it is a problem with the
unit. Contact supplier.
Motor current imbalance
greater than 3%
Problem with motor or motor
wiring
Rotate output motor leads one
position: U to V, V to W, W to U.
If imbalanced leg follows the wire,
the problem is in the motor or
motor wiring. Check motor and
motor wiring.
Problem with drive unit Rotate output motor leads one
position: U to V, V to W, W to U.
If imbalance leg stays on same
output terminal, it is a problem with
the unit. Contact supplier.
Basic Troubleshooting
VLT
®
AutomationDrive Operating
Instructions
MG.33.AJ.02 - VLT
®
is a registered Danfoss trademark 61
9

 Loading...
Loading...










