Dobot M1 Pro Hardware User Guide
Issue V1.3 (2023-02-02) User Guide Copyright © Yuejiang Technology Co., Ltd
14
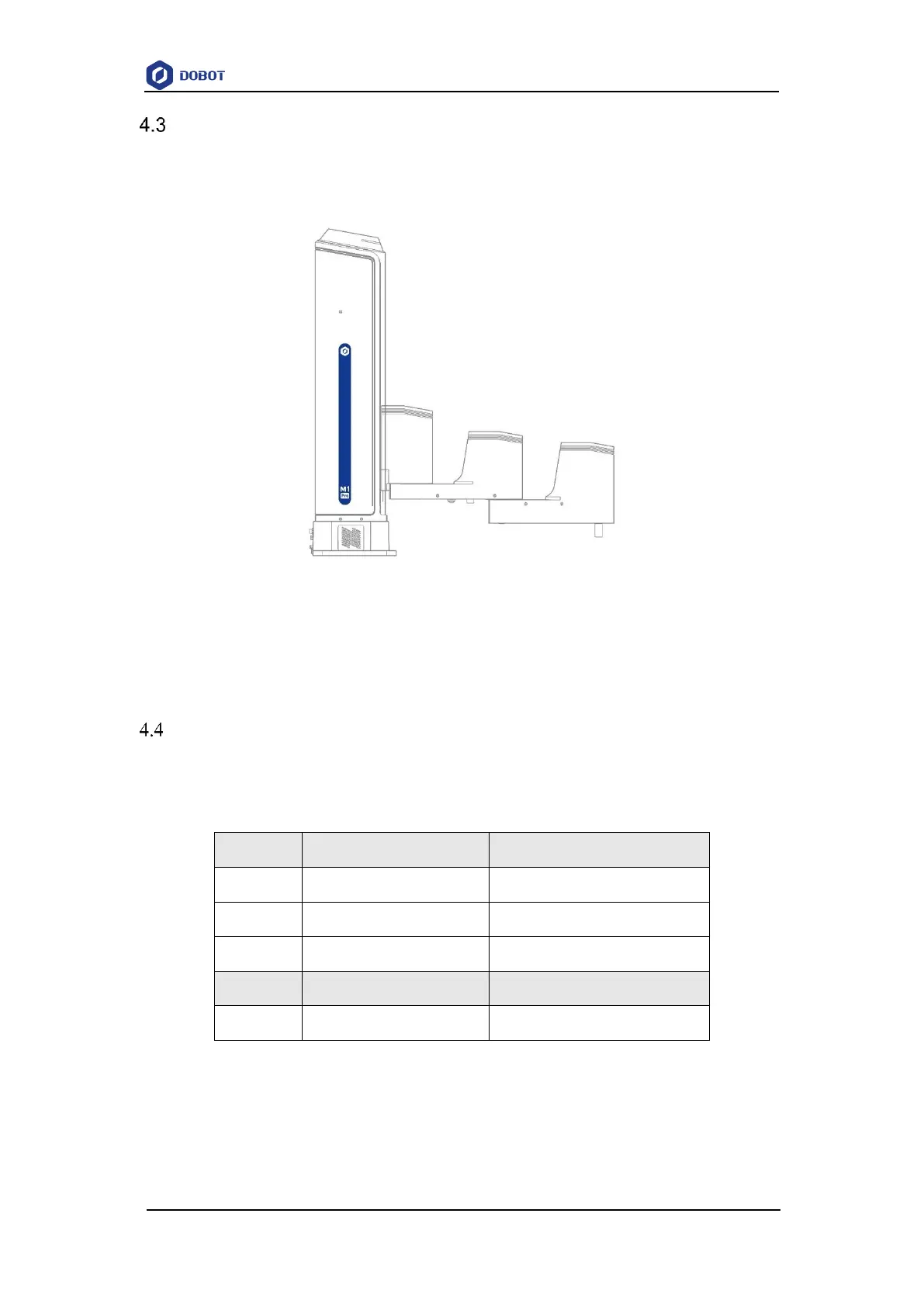
Home posture
The posture when all the joint angles/position of the robot are 0 degrees/mm is called the home
posture, as shown in the figure below.
Figure 4.6 Home posture of M1 Pro robot
If the home point of the robotic arm changes due to the replacement of transmission parts or
collision, you can use the calibration block and control software in the delivery accessories to
calibrate. For details, refer to the corresponding control software user manual.
Stop time and angle
The Max. stop time and angle of axis J1, J2, J3 and J4 at the max speed, load and arm stretch
are shown below.
Table 4.1 Stop time and angle