Setup & Operation 5. Motion Range
S5 Rev.5 69
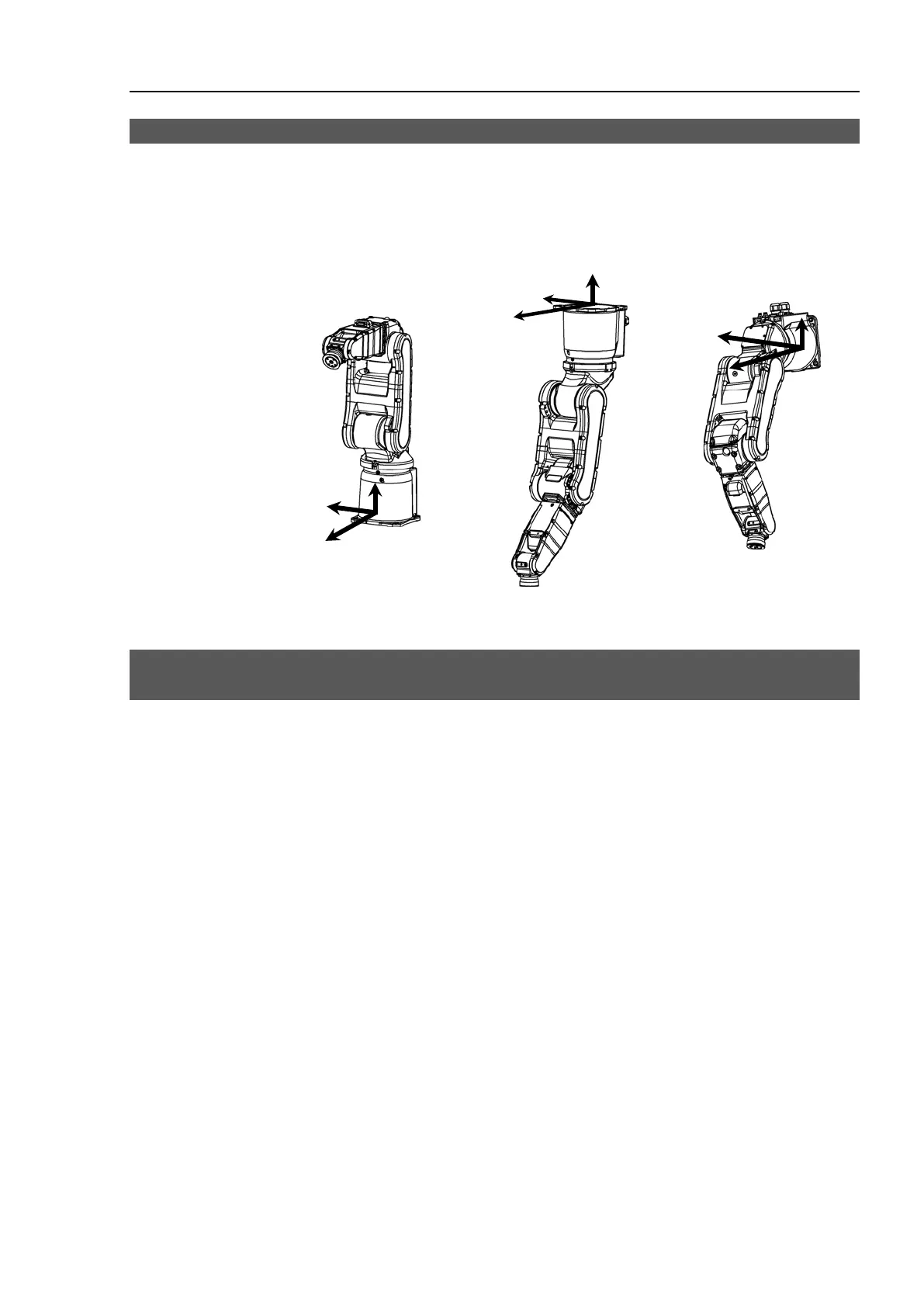
5.3 Coordinate System
The origin point is located where the Manipulator base intersects with the rotation axis of
Joint #1.
For details on the coordinate system, refer to the software manual.
5.4 Setting the Cartesian (Rectangular) Range in the XY Coordinate
System of the Manipulator
The Cartesian (rectangular) range in the XY coordinate system of the Manipulator is
specified by the limited Manipulator operation area and the XYLim setting.
The limited Manipulator operation area is defined so that the end effector does not
interfere with the rear side of the Manipulator. The XYLim setting is that you can set the
upper and lower limits of the X and Y coordinates.
The limited Manipulator operation area and XYLim setting apply only to the software.
Therefore, these settings do not change the physical range. The maximum physical range
is based on the position of the mechanical stops.
These settings are disabled during a joint jogging operation. Therefore, be careful not to
allow the end effector to collide with the Manipulator or peripheral equipment.
The method for changing the XYLim setting varies with the software used.
Set the XYLim setting from EPSON RC+-[Tools]-[Robot manager]-[XYZ Limits] panel.
You may also execute the XYLim command from the [Command Window].

 Loading...
Loading...





