Chapter 10 Parameter Shenzhen Hpmont Technology Co., Ltd.
- 94 - HD09-S Series User Manual V1.1
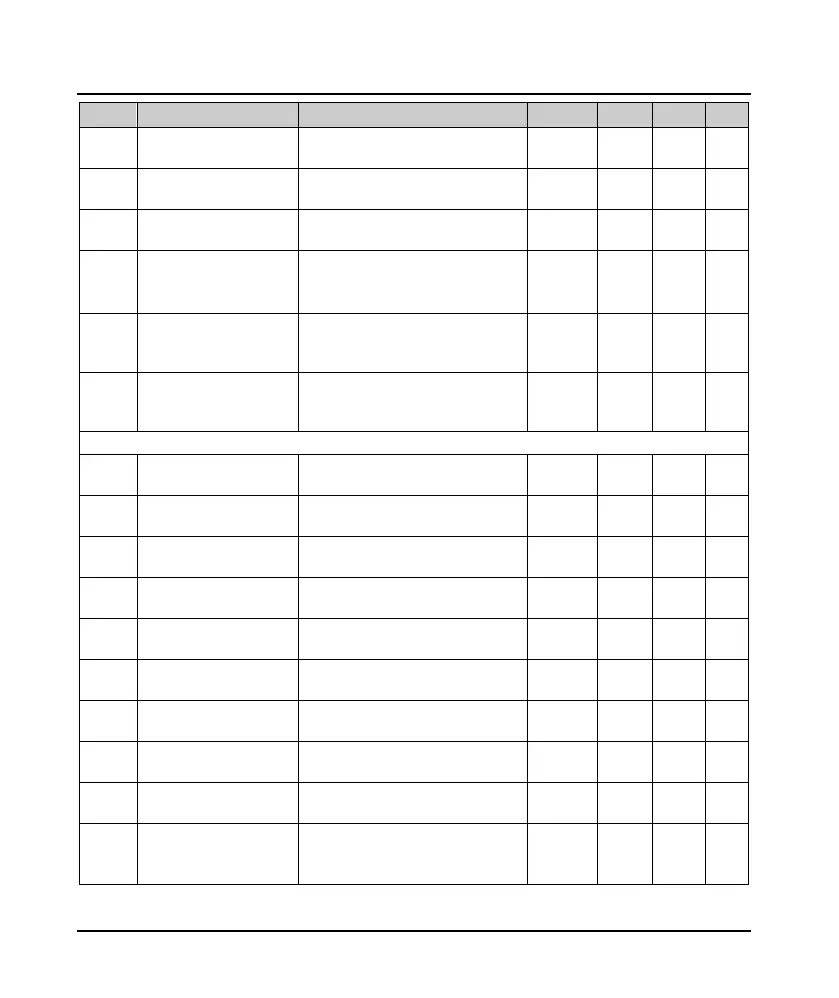
Ref. Code
Function
Setting Range
Default
Unit
F09.10
Motor slip compensation
filtering time
0.01 - 10.00s 0.10s 0.01s
○
F09.11
Motor slip compensation
limit
0.0 - 250.0% 200.0% 0.1%
×
F09.12 Motor iron loss 0.000 - 9.999kW
Type
confirmed
0.001
kW
×
F09.14
AVR function (automatic
voltage rugulator)
0: No action
1: Constant action
2: Only Dec. and no action
1 1
○
F09.15
Motor low frequency
suppression shock
coefficient
0 - 200 50 1
○
F09.16
Motor high frequency
suppression shock
coefficient
0 - 200 20 1
○
F10: Motor Vector Control Speed-loop Parameters
F10.00
Speed control proportional
gain 1 of motor
0.1 - 200.0 10.0 0.1
○
F10.01
Speed control integral time
1 of motor
0.00 - 10.00s 0.20s 0.01s
○
F10.02
Speed control proportional
gain 2 of motor
0.1 - 200.0 10.0 0.1
○
F10.03
Speed control integral time
2 of motor
0.00 - 10.00s 0.20s 0.01s
○
F10.04
Speed-loop PI switching
frequency 1 of motor
0.00 - 50.00Hz 10.00Hz 0.01Hz
○
F10.05
Speed-loop PI switching
frequency 2 of motor
0.00 - 50.00Hz 15.00Hz 0.01Hz
○
F10.06
Motor speed loop integral
limit
0.0 - 200.0% (F08.02) 180.0% 0.1%
○
F10.07
Motor speed loop
differential time
0.00 - 1.00s 0.00s 0.01s
○
F10.08
Motor speed loop output
filter time
0.000 - 1.000s 0.010s 0.001s
○
F10.09
Motor torque limit lock
selection
0: Not locked
1: All torque limits are in line with the
limits of FWD electric torque
0 1
×

 Loading...
Loading...
