Shenzhen Hpmont Technology Co., Ltd. Chapter 5 Function Introduction
HD3N-TC Series Inverter User Manual V1.0 ―37―
5.2.6 F08: Asyn. Motor 1 Parameter
Formular of mutual inductance:
MutualinductanceF08.10
F08.01/
√
3
2πF08.03F08.11
F08.09
Ref. code Name Description Setting Range [Default]
F08.00 Rated power of motor 1 0.2 - 500.0kW [Depend on model]
F08.01 Rated voltage of motor 1 0 - 999V [Depend on model]
F08.02 Rated current of motor 1 0.1 - 999.9A [Depend on model]
F08.03 Rated frequency of motor 1 1.0 - 400.0 [50.0Hz]
F08.04 Rated Rpm of motor 1 1 - 24000rpm [Depend on model]
F08.00 - F08.04: Set rated value of motor according to motor nameplate.
F08.06 Parameter auto-tuning of motor 1 0 - 3 [0]
Note: F08.06 is enabled only in keypad control (F00.11 = 0).
0: No action.
1: Stationary auto-tuning.
• In the process of motor stationary auto-tuning, the stator resistance, rotor resistance and leakage
inductance will be auto-measured and written into F08.07, F08.08 and F08.09.
2: Rotary auto-tuning.
• Firstly motor is in stationary state, and stator resistance, rotor resistance and leakage inductance are
measured; then motor enters rotary state, and mutual inductance, excitation current, rated slip, flux
saturation coefficient will be auto-measured and written into F08.07 - F08.11.
• During rotating, motor may encounter oscillation and or overcurrent. Press button ( ) to stop
suto-tuning, and adjust F09.15, F09.16 (oscillation suppresstion coeffiscient) to lessen oscillation.
3: Motor stator resistance measurement.
• When motor is in stationary state, stator resistance will be auto-measured and written into F08.07.
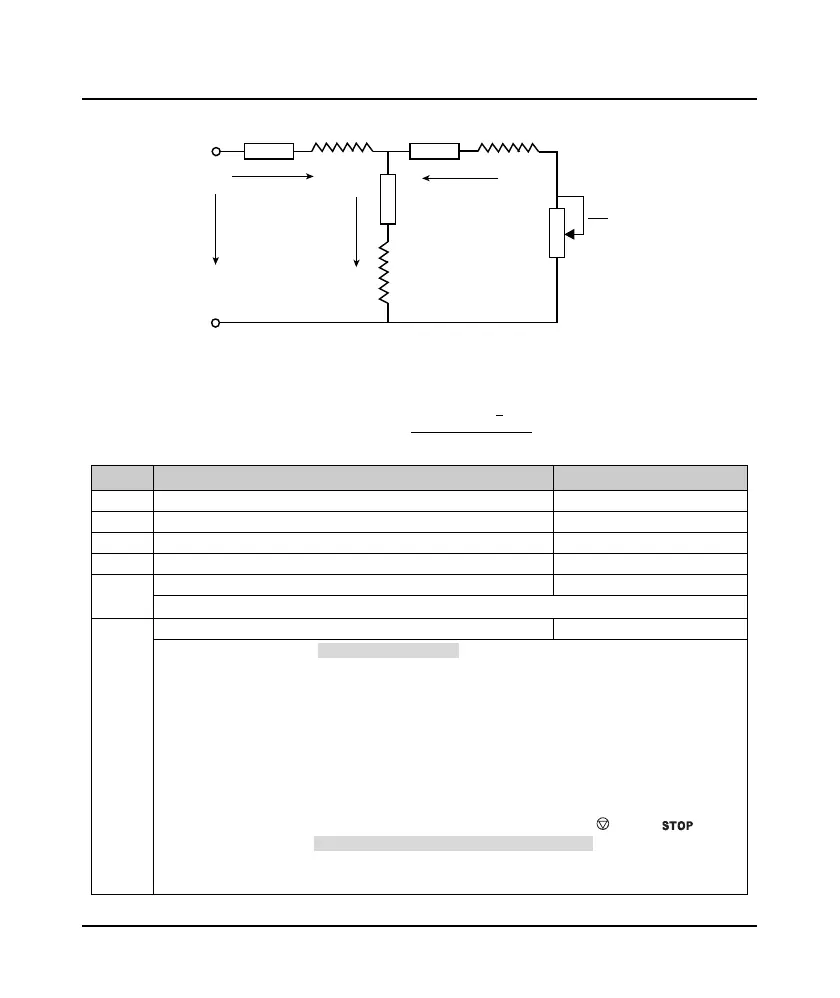
L
m
R1=F08.07 (Stator resistance)
R2=F08.08 (Rotor resistance)
Io=F08.11 (Excitation current)
R1 R2LI
I1 I2
S
1-S
R2
LI
LI=F08.09 (Leakage inductance)
Lm=F08.10 (Mutual inductance)
S=Slip ratio
U1
Io
 Loading...
Loading...


