Shenzhen Hpmont Technology Co., Ltd. Chapter 5 Function Introduction
HD3N-TC Series Inverter User Manual V1.0 ―41―
Ref. code Name Description Setting Range [Default]
F09.19 V/f frequency of special motor 1 (F3) F09.21 - 100.0 [100.0%]
F09.20 V/f voltage of special motor 1 (V3) F09.22 - 100.0 [100.0%]
F09.21 V/f frequency of special motor 1 (F2) F09.23 - F09.19 [40.0%]
F09.22 V/f voltage of special motor 1 (V2) F09.24 - F09.20 [42.0%]
F09.23 V/f frequency of special motor 1 (F1) 0.0 - F09.21 [10.0%]
F09.24 V/f voltage of special motor 1 (V1) 0.0 - F09.22 [12.0%]
For special motor. Adopt user defined V/f curve in F09.19 - F09.24.
• Refer to F09.01 - F09.06.
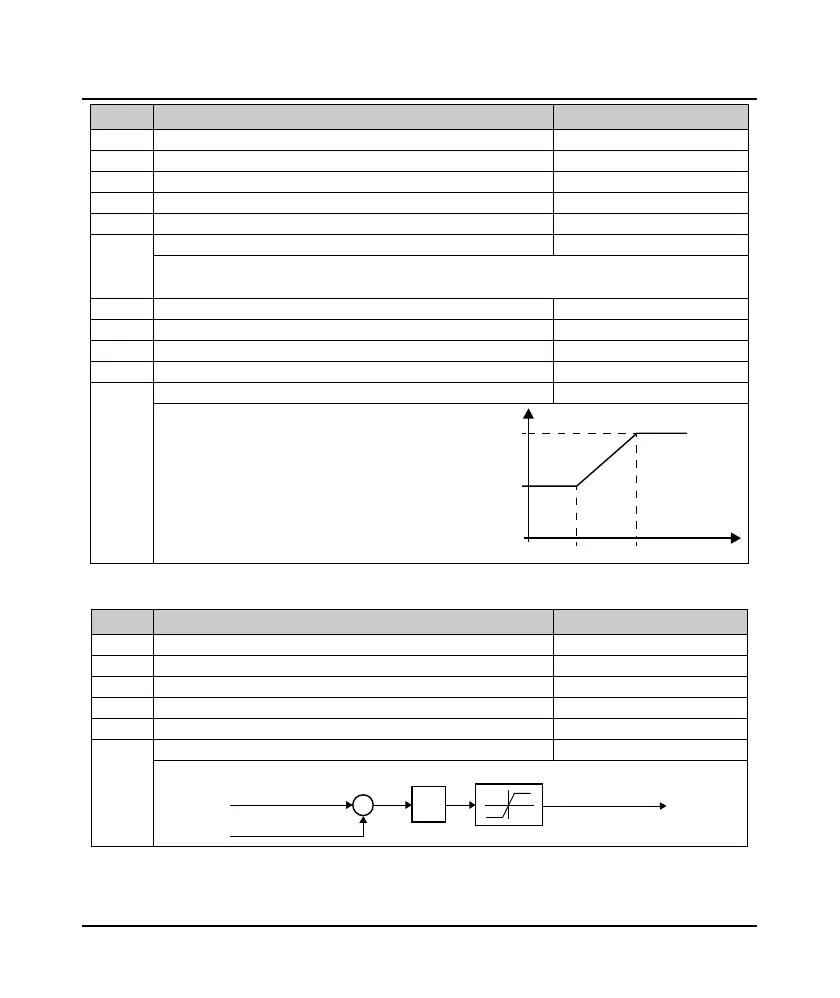
F09.25 Slip compensation gain of special motor 1 (low speed) 0.0 - 300.0 [0.0%]
F09.26 Slip compensation gain of special motor 1 (high speed) 0.0 - 300.0 [100.0%]
F09.27 Slip compensation switching frequency 1 of special motor 1 0.00 - F09.28 [5.00Hz]
F09.28 Slip compensation switching frequency 2 of special motor 1 F09.27 - F08.03 [10.00Hz]
F09.29 Slip compensation selection of special motor 1 00 - 11 [11]
Units: UP slip compensation selection
Tens: DN slip compensation selection
• 0: Set by F09.26.
• 1: Set by F09.25 - F09.26.
5.2.8 F10: Motor 1 Vector Control Speed-loop Parameters
Ref. code Name Description Setting Range [Default]
F10.00 Proportional gain 1 of motor 1 speed control 0.1 - 200.0 [10.0]
F10.01 Integral time 1 of motor 1 speed control 0.00 - 10.00 [0.10s]
F10.02 Proportional gain 2 of motor 1 speed control 0.1 - 200.0 [10.0]
F10.03 Integral time 2 of motor 1 speed control 0.00 - 10.00 [0.20s]
F10.04 Switching frequency 1 of motor 1 speed loop 0.00 - F10.05 [10.00Hz]
F10.05 Switching frequency 2 of motor 1 speed loop F10.04 - 50.00 [15.00Hz]
F10.00 - F10.05,F10.07 set the PID parameter of speed regulator (ASR). The structure is shown in figure.
F09.25
F09.26
F09.27 F09.28
Output frequency
Slip compensation gain
Torque current setting
Frequency command
+
-
Frequency feedback
PID
Error
Torque limit
 Loading...
Loading...


