32
2. Specification
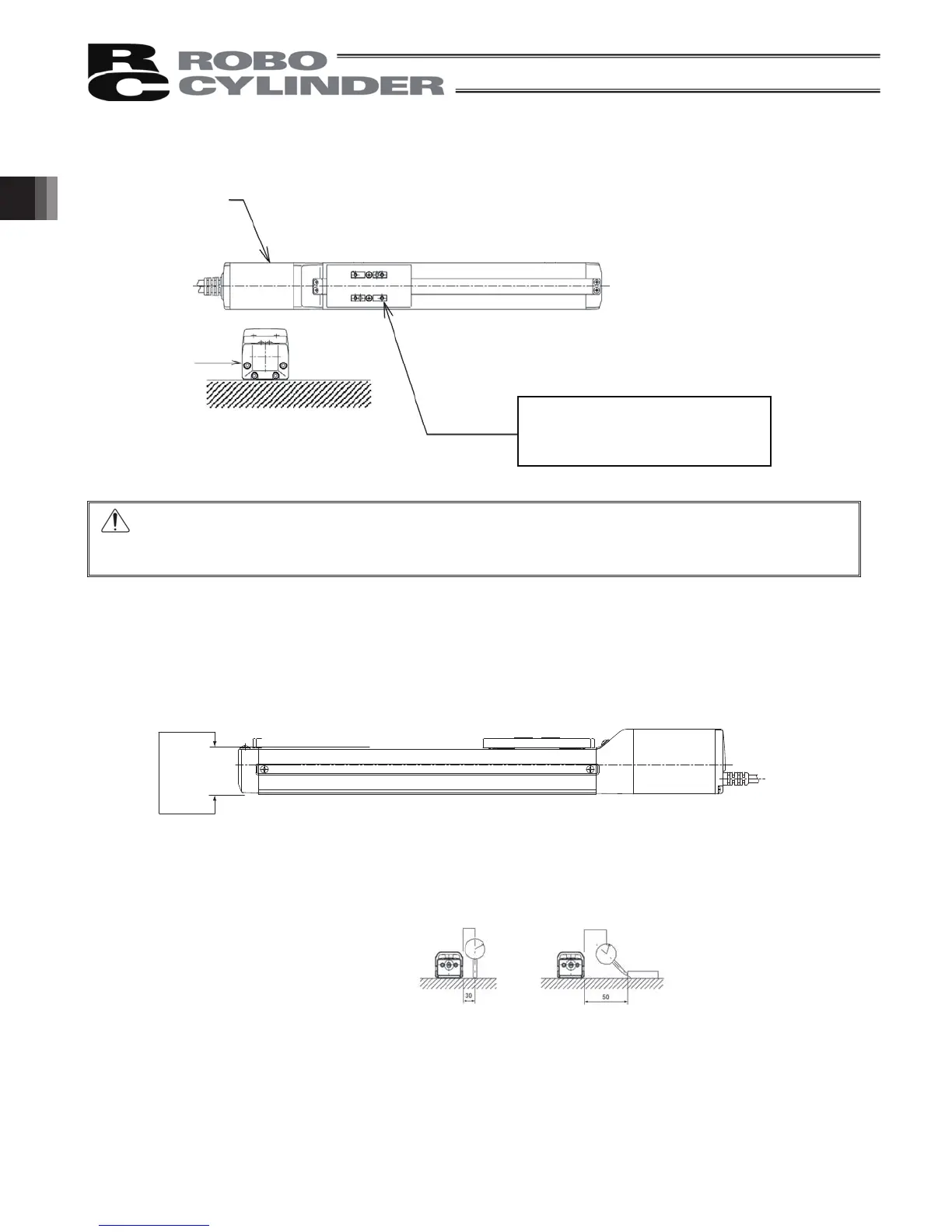
The body of the base warps easily when the actuator is used as the Y-axis in an X-Y overhang setup. In this case,
use the actuator so that the Ma and Mc moments are kept to one-half the allowable moment or less (see the
figure below).
Caution: Allowing the slider to receive an excessive load moment will shorten the service life of the
guides. If the allowable overhang length is exceeded, vibration may generate or the service
life of the guides may be reduced.
(7) Actuator Precision
[1] Actuator installation surface
Parallelism of the actuator installation surface (bottom surface of the base) and load installation surface
(top surface) at an arbitrary stroke position: 0.1 mm or less
[2] Traveling parallelism when the actuator is installed (affixed on a flat, smooth surface
*1
): 0.05 mm/m or
less
Condition: The above values have been measured at 20qC. *1 Parallelism: 0.05 mm/m or less
Y-axis
X-axis
The Ma and Mc moments applied
on this slider should be kept to
one-half the allowable moment.
 Loading...
Loading...







