92
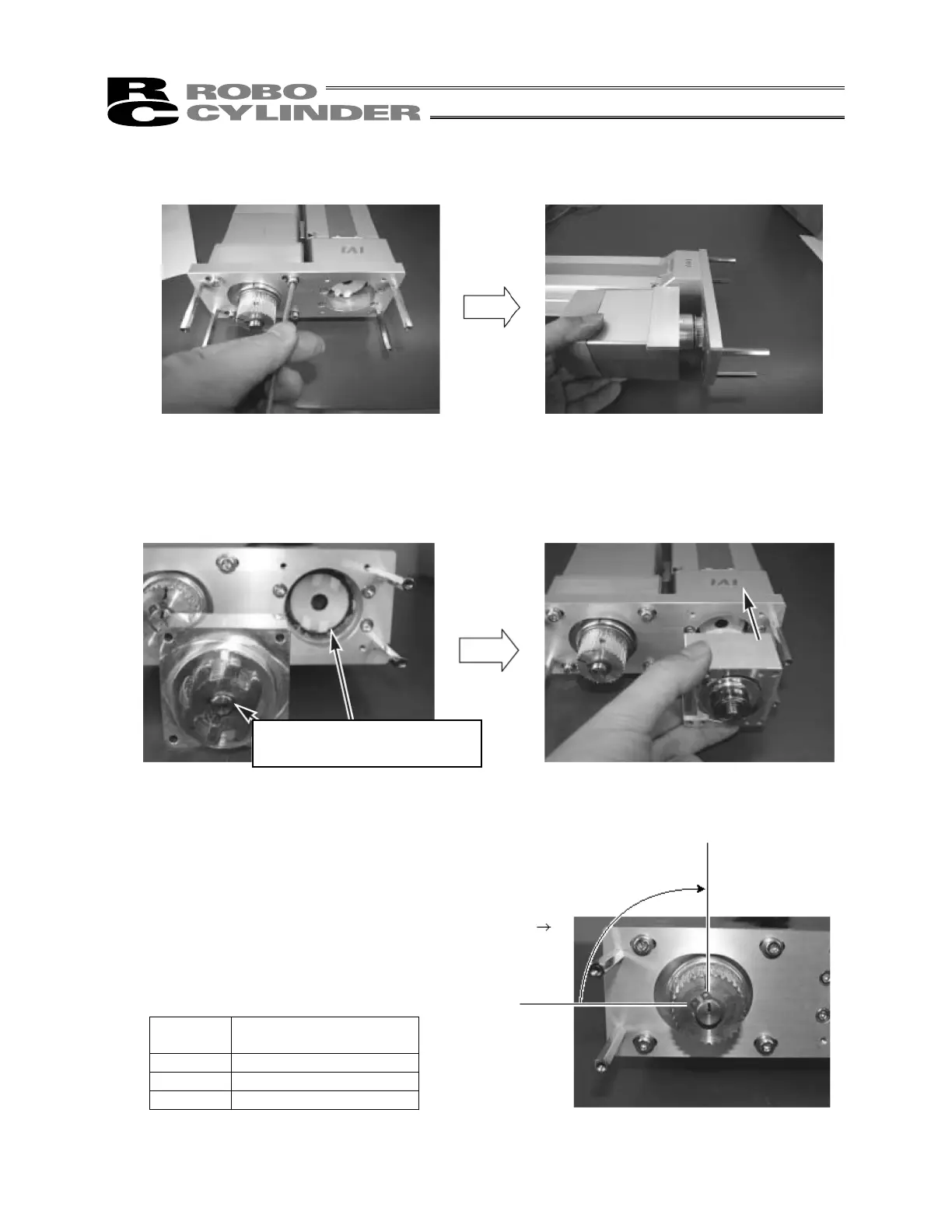
Example: When the return angle is 90 degrees
Initial countermark position
4) Remove the motor.
Remove the four hexagon socket-head bolts using an Allen wrench.
5) Install the new motor.
Loosely affix the four hexagon socket-head bolts (M4x20) using an Allen wrench of 3 mm across flats.
6) Install the pulley housing.
(Install the pulley housing by making sure the angle of the projection on the coupling matches the
angle of the mating hole.)
7) Make the adjustment to restore the home position.
Press the slider against the mechanical end on the home side and affix the slider in this position.
Turn the motor shaft away from the countermark by the specified distance in the direction of
returning to the mechanical end (the direction checked earlier).
Type
Return angle from
countermark position
SA7R-4 180 degrees
SA7R-8 90 degrees
SA7R-16 45 degrees
Align the projection on the
coupling with the mating hole.

 Loading...
Loading...





