48
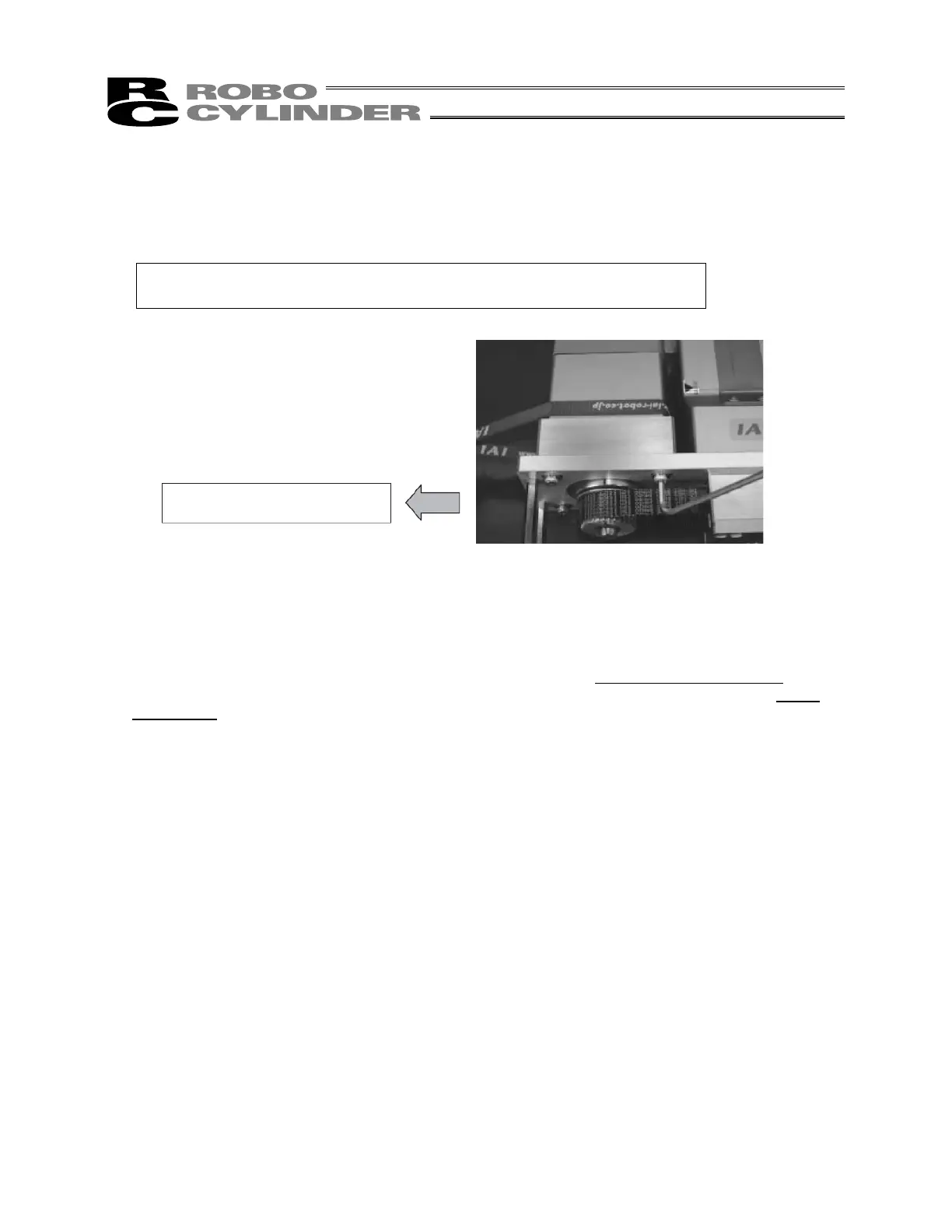
6) Adjust the belt tension.
Pass a looped strong string (or long tie-band) around the motor cover and pull it with a tension gauge
to the specified tension. In this condition, uniformly tighten the adjustment bolts.
[Recommenced tightening torque for adjustment bolts] (M4) 377 N-cm (38 kgf-cm)
Caution: Carefully tighten them to the specified torque by making sure the
pulleys on both sides do not move.
7) Install the pulley cover.
Tighten the four thin-head screws (M3x6) using an Allen wrench of 1.5 mm across flats.
8) Perform homing using a PC or teaching pendant.
(If the actuator is of absolute encoder specification, an absolute reset must be performed.)
Check for deviation from the initial home position.
If there is a deviation when the SCON controller is being used, use home return offset distance
of
parameter No. 22 to make corrections. If the SSEL or the X-SEL controller is being used, use home
preset value of axis-specific parameter No. 12 to make corrections.
For the absolute encoder specification, perform homing absolute reset after changing the parameter.
Tension: 8 kgf 0.3 kgf

 Loading...
Loading...





