77
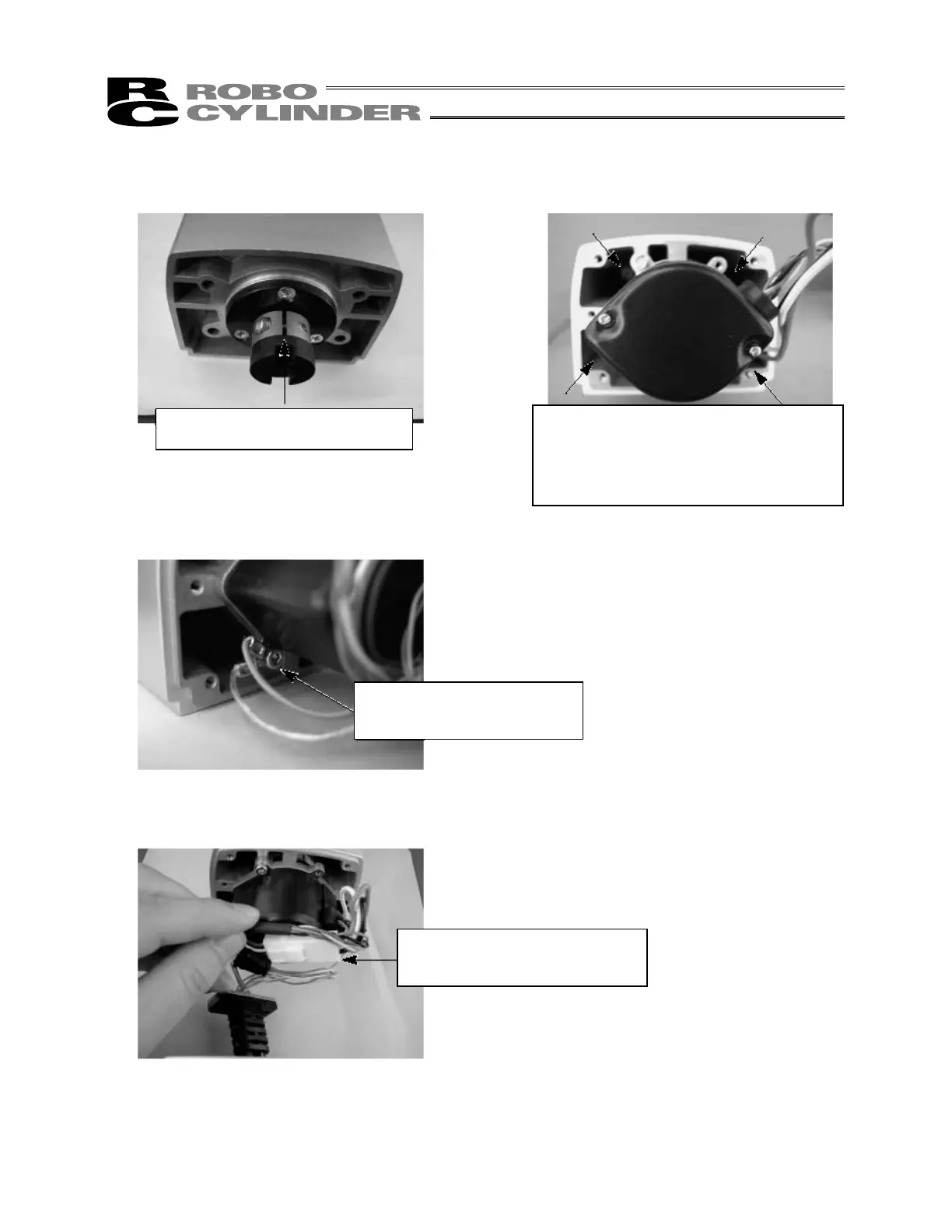
7) Position the new motor so that the slit in the coupling points to the 12 o’clock position, and install the
motor in this condition by engaging its coupling with the coupling on the actuator side.
8) Affix the grounding and shield wires for the attached cables.
9) Connect the relay connectors (for the motor, encoder and brake).
Store the motor connector into the space at the rear of the encoder protection cap above the cap.
The slit in the coupling should point
to the 12 o’clock position.
Using an Allen wrench of 3 mm across flats,
uniformly tighten the four hexagon socket-
head bolts (M4x25) affixing the motor to
secure the motor.
Tightening torque: 176 N-cm (18.0 kgf-cm)
Tighten the hexagon socket-
head bolt (M3x8) using an Allen
wrench of 2.5 mm across flats.
Store the motor connector into the
space at the rear of the encoder
protection cap above the cap.

 Loading...
Loading...





