TLE5012B
Specification
User’s Manual 26 Rev. 1.2, 2018-02
4.2 Prediction mode
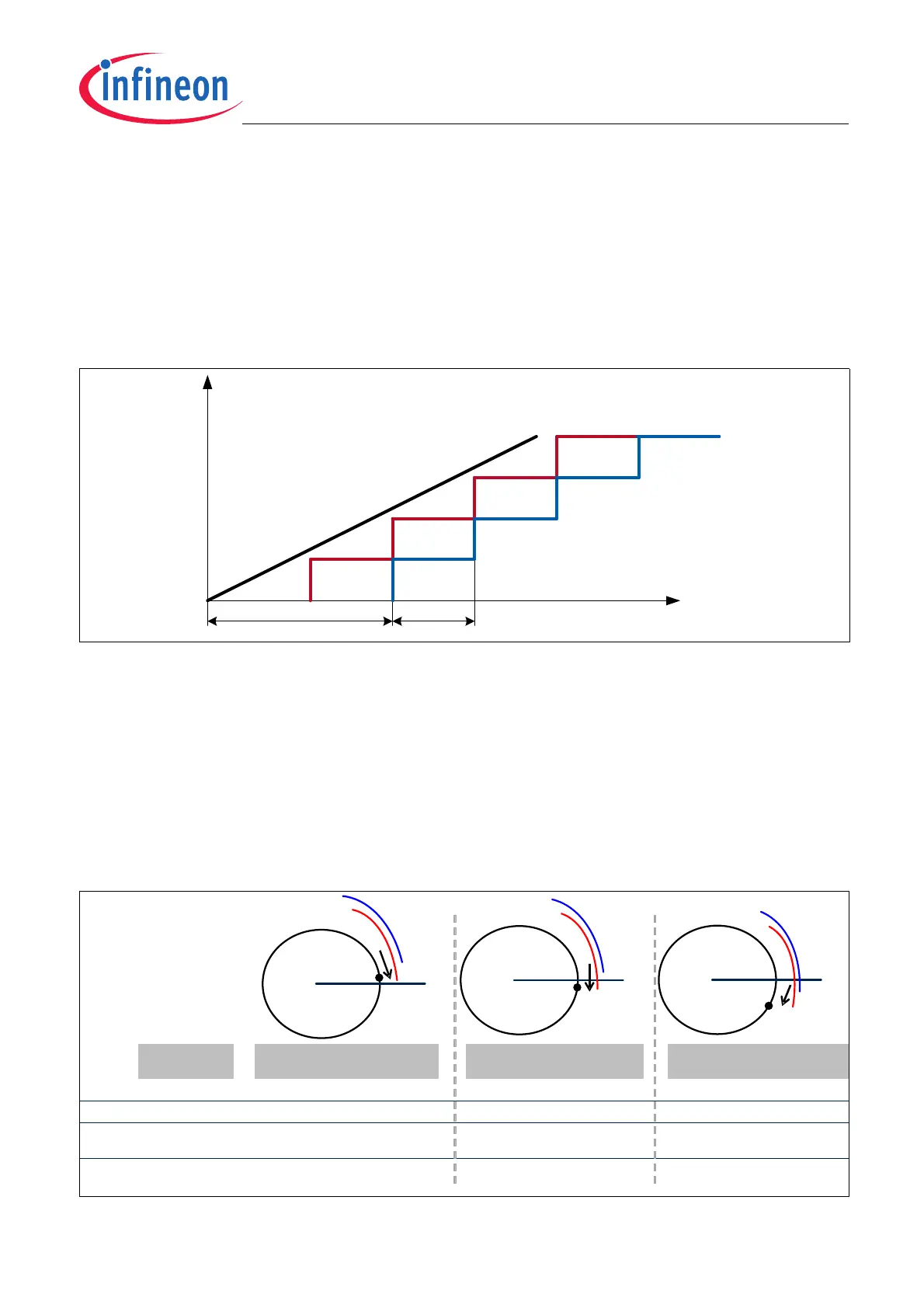
The TLE5012B has an optional prediction feature, which serves to reduce the speed dependent angle error in
applications where the rotation speed does not change abruptly. Prediction (enable PREDICT bit on MOD_2
register) uses the difference between current and last two angle values to approximate the angle value which will
be present after the delay time (see Figure 4-5). The output value is calculated by adding this difference to the
measured value, according to Equation (4.1).
(4.1)
Figure 4-5 Delay of sensor output
Revolution counter on prediction mode
The revolution counter (REVOL bits on AREV register) counts full rotations of the magnetic field. It increments
when the measured angle crosses the 0° point in counter-clockwise rotation direction, and it decrements when the
0° point is crossed in clockwise rotation direction. The revolution counter always works with the measured angle
(current angle and not predicted angle). Therefore, the prediction angle may already indicate that the 0° has been
crossed but the revolution counter may still not increase or decrease if the current calculated angle has not yet
changed quadrant. Once the current calculated angle crosses 0°, the revolution counter will be updated. The
Figure 4-6 illustrates an example; in the second picture the angle value with prediction has already crossed the
0° (from 1° to 359°), but the revolution counter has not yet decreased (remains 43):
Figure 4-6 Revolution counter with prediction mode disabled/enabled
−−−+=+
time
Angle
With
Prediction
Without
Prediction
t
adel
t
upd
Magnetic field
direction
Sensor output
Prediction
Angle
Value
Revolution
counter
Angle
Value
Revolution
counter
Angle
Value
Revolution
counter
Register MOD_2; 08
H
AVAL; 02
H
AREV; 04
H
AVAL; 02
H
AREV; 04
H
AVAL; 02
H
AREV; 04
H
Field PREDICT [2] ANG_VAL [14:0] REVOL [8:0] ANG_VAL [14:0] REVOL [8:0] ANG_VAL [14:0] REVOL [8:0]
Without
prediction
0 3 43 1 43 359 42
With
prediction
1 1 43 359 43 357 42
0°
0°
0°