This parameter specifies the gain of analog input 2. The gain unit is associated with P3.27.
Note:
Analog input 2 indicates the signal input from the analog speed/speed limit terminals (AD2 and
GND, corresponding to pin 20 and pin 19) of the CN1 plug.
Application example:
1. The function of analog input 2 is torque command.
2. The voltage of analog input 2 corresponds to the conversion gain of the motor torque command.
3. This parameter is valid only when P0.60 is 1.
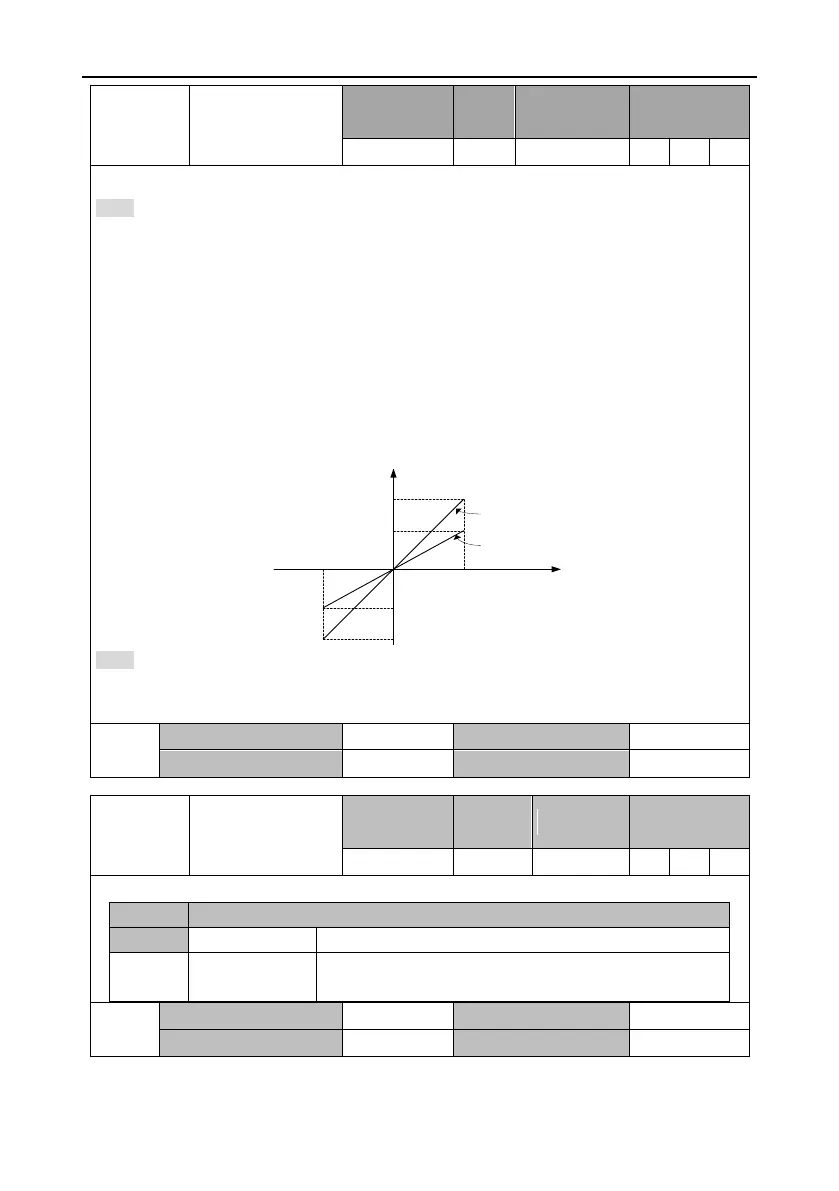
4. The relationship between the voltage of analog input 2 and torque command is as follows: The
torque corresponding to every 1V voltage is 10% of the rated torque by default.
Actual torque command = Analog input voltage x P0.62
Note:
Set this parameter according to the motor working condition. If this parameter is set to a large
value, the motor speed may fluctuate sharply.
 Loading...
Loading...
