DA180 series basic AC servo drive Function codes
-159-
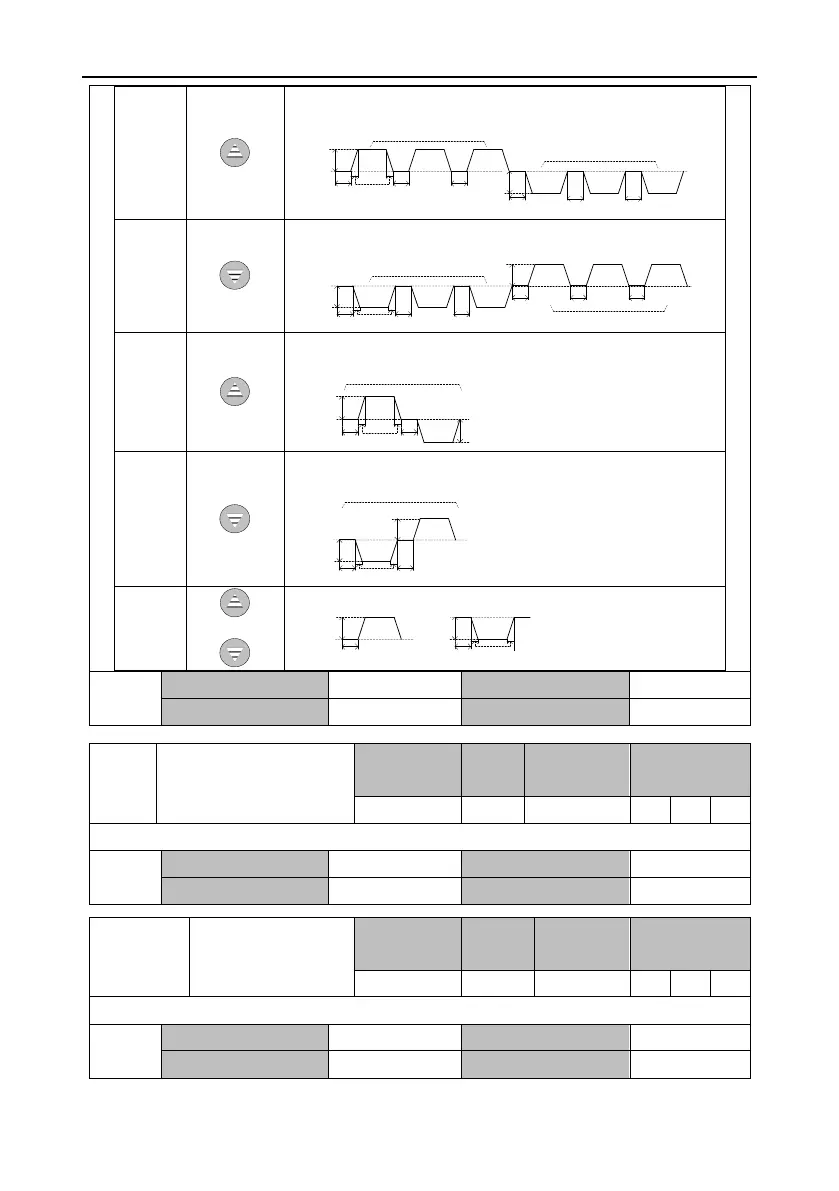
(Wait time P5.04→Forward moving P5.01) × Cycles P5.05
→(Wait time P5.04→Reverse movingP5.01) × Cycles P5.05
P5.02
Speed 0
P5.04 P5.03 P5.04 P5.04
P5.05
P5.01 P5.01
P5.01
P5.04 P5.04
P5.05
P5.01P5.01
P5.01
P5.04
P5.02
(Wait time P5.04→Reverse moving P5.01) × Cycles P5.05
→(Wait time P5.04→Forward moving P5.01) × Cycles P5.05
P5.02
P5.04 P5.04 P5.04
P5.05
P5.01 P5.01
P5.01
P5.02
Speed 0
P5.04 P5.04
P5.05
P5.01P5.01
P5.01
P5.03 P5.04
(Wait time P5.04→Forward moving P5.01→Wait time P5.04
→Reverse moving P5.01) × Cycles P5.05
P5.02
P5.02
Speed 0
P5.04 P5.03 P5.04
P5.01
P5.05
P5.01
(Wait time P5.04→Reverse moving P5.01→Wait time P5.04
→Forward moving P5.01) × Cycles P5.05
P5.01
P5.02
Speed 0
P5.04 P5.04
P5.01
P5.03
P5.02
P5.05
(Wait time P5.04→Forward/reverse moving P5.01) × 1 cycle
P5.01
Speed 0
P5.04
P5.02
P5.02
Speed 0
P5.04
P5.01
P5.03
This parameter specifies the increment of the position movement at jogging.
This parameter specifies the maximum running speed at jogging.
 Loading...
Loading...
