Goodrive35 Series Closed-loop Vector Control VFD Basic operation instruction
140
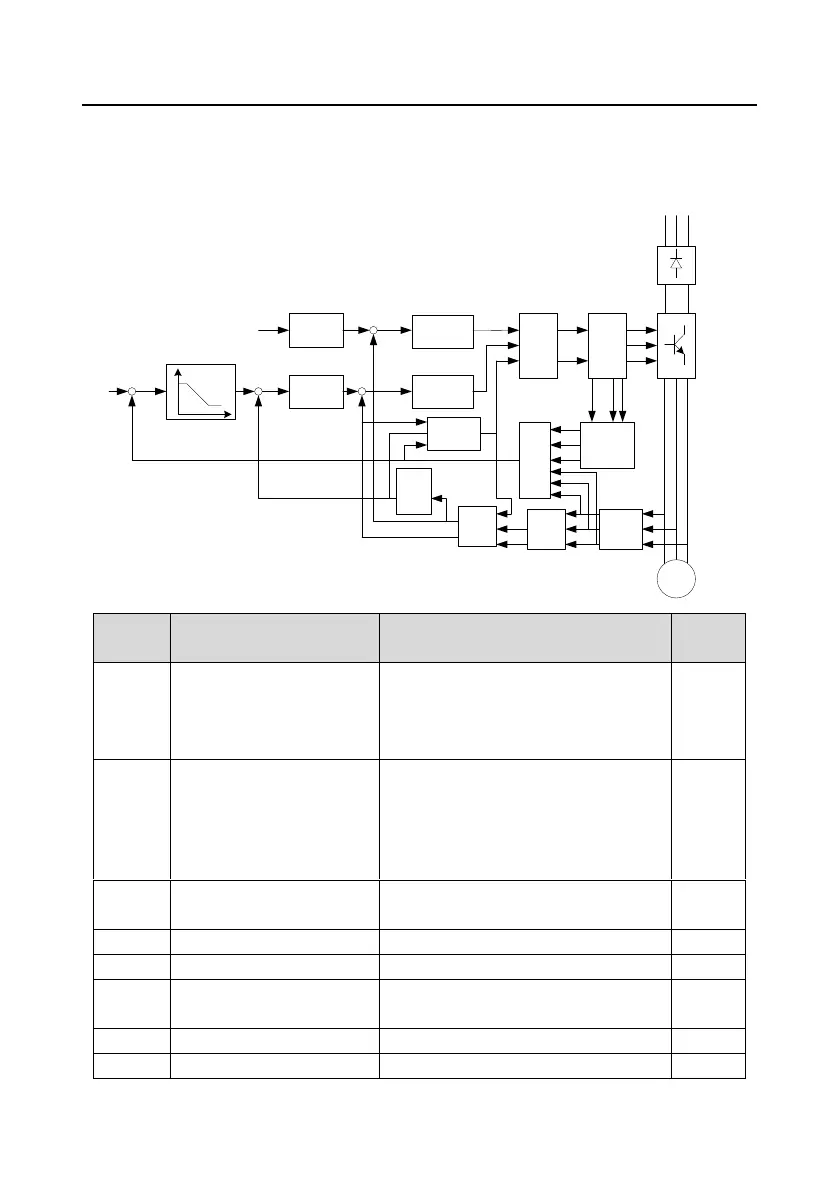
Because the vector control calculation is very complicated, high technical theory is needed for the
user during internal autotune. It is recommended to use the specific function parameters in vector
control with cautions.
Calculate i
m
ACR
Excitation
current
Flux
linkage
observa
tion
Current
detection
Position
observation
Speed
identifi
cation
Voltage
detection
ACR
Torque
current
Calculate i
T
Park
change
PWM
pulse
Rectifier
bridge
Inverter
bridge
Motor
Park
change
Clark
change
φ
+
-
+
-
+
-
U
V
U
W
Uu
i
U
i
V
i
W
U
V
U
W
Uu
i
M
i
T
1w
r
1w
r
φ
i
T
R S T
Detailed instruction of parameters
0: Sensorless vector control mode 1
1: Sensorless vector control mode 2
2: SVPWM control
3: Closed-loop vector control mode
Motor parameter autotuning
0: No operation
1: Rotation autotuning
2: Static autotuning 1 (autotune totally)
3: Static autotuning 2 (autotune part
parameters)
0: Asynchronous motor
1: Synchronous motor
Low-point frequency for
switching

 Loading...
Loading...