Goodrive35 Series Closed-loop Vector Control VFD Communication protocol
227
Note:
The parameters in the P29 group are set by the manufacturer. They cannot be read or modified.
Some parameters cannot be modified when the VFD is running; some cannot be modified regardless
of the state of the VFD. Pay attention to the setting range, unit, and related description of a parameter
when modifying it.
The service life of the Electrically Erasable Programmable Read-Only Memory (EEPROM) may be
reduced if it is frequently used for storage. For users, some function codes do not need to be stored
during communication. The application requirements can be met by modifying the value of the
on-chip RAM, that is, modifying the MSB of the corresponding function code address from 0 to 1. For
example, if P00.07 is not to be stored in the EEPROM, you need only to modify the value of the RAM,
that is, set the address to 8007H. The address can be used only for writing data to the on-chip RAM,
and it is invalid when used for reading data.
10.4.5.2 The address instruction of other function in Modbus
In addition to modifying the parameters of the VFD, the master can also control the VFD, such as start
and stop it, and monitor the operation state of the VFD.
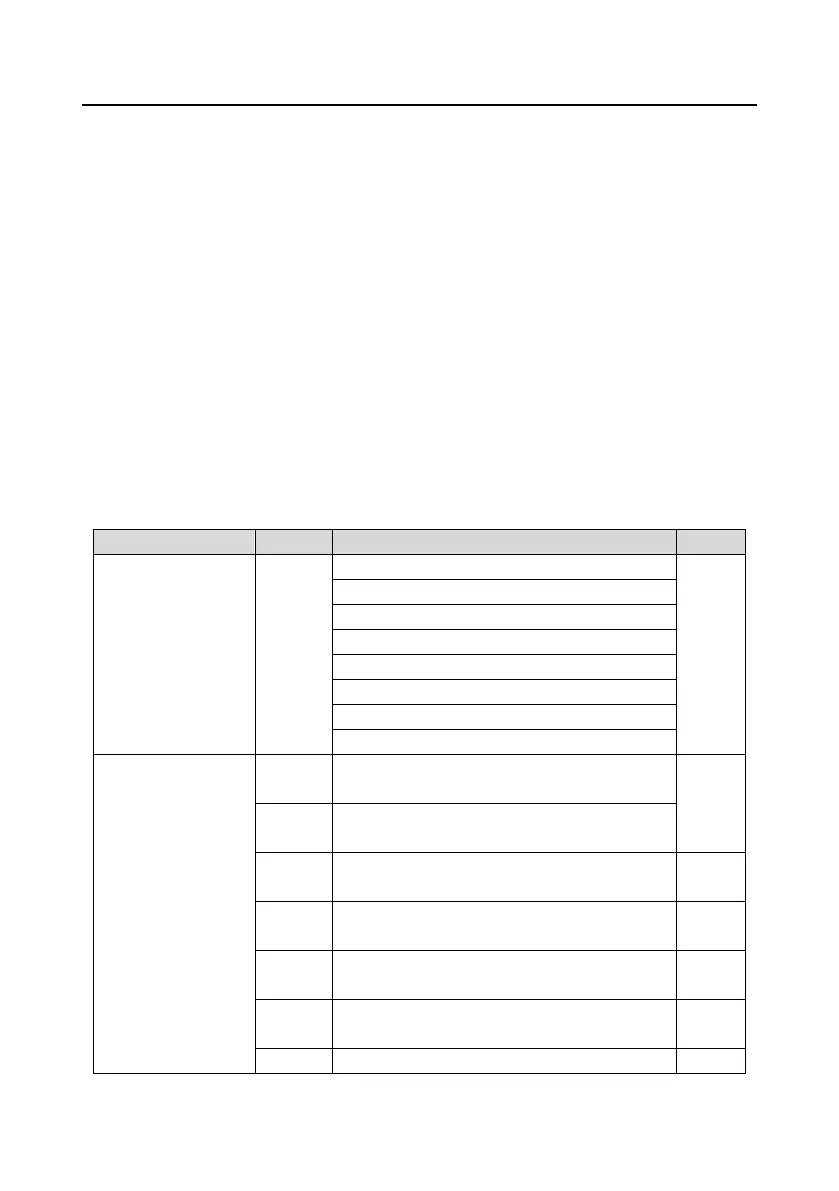
The following table describes other function parameters.
Communication-based
control command
0006H: Coast to stop (emergency stop)
Communication-based
value setting
Communication-based frequency setting
(0–Fmax, unit: 0.01 Hz)
PID setting, range (0–1000, 1000 corresponding
to 100.0%)
PID feedback, range (0–1000, 1000
corresponding to 100.0%)
Torque setting (-3000–+3000, 1000 corresponding
to 100.0% of the rated current of the motor)
Setting of the upper limit of the forward running
frequency (0–Fmax, unit: 0.01 Hz)
Setting of the upper limit of the reverse running
frequency (0–Fmax, unit: 0.01 Hz)
Upper limit of the electromotion torque (0–3000,

 Loading...
Loading...