193
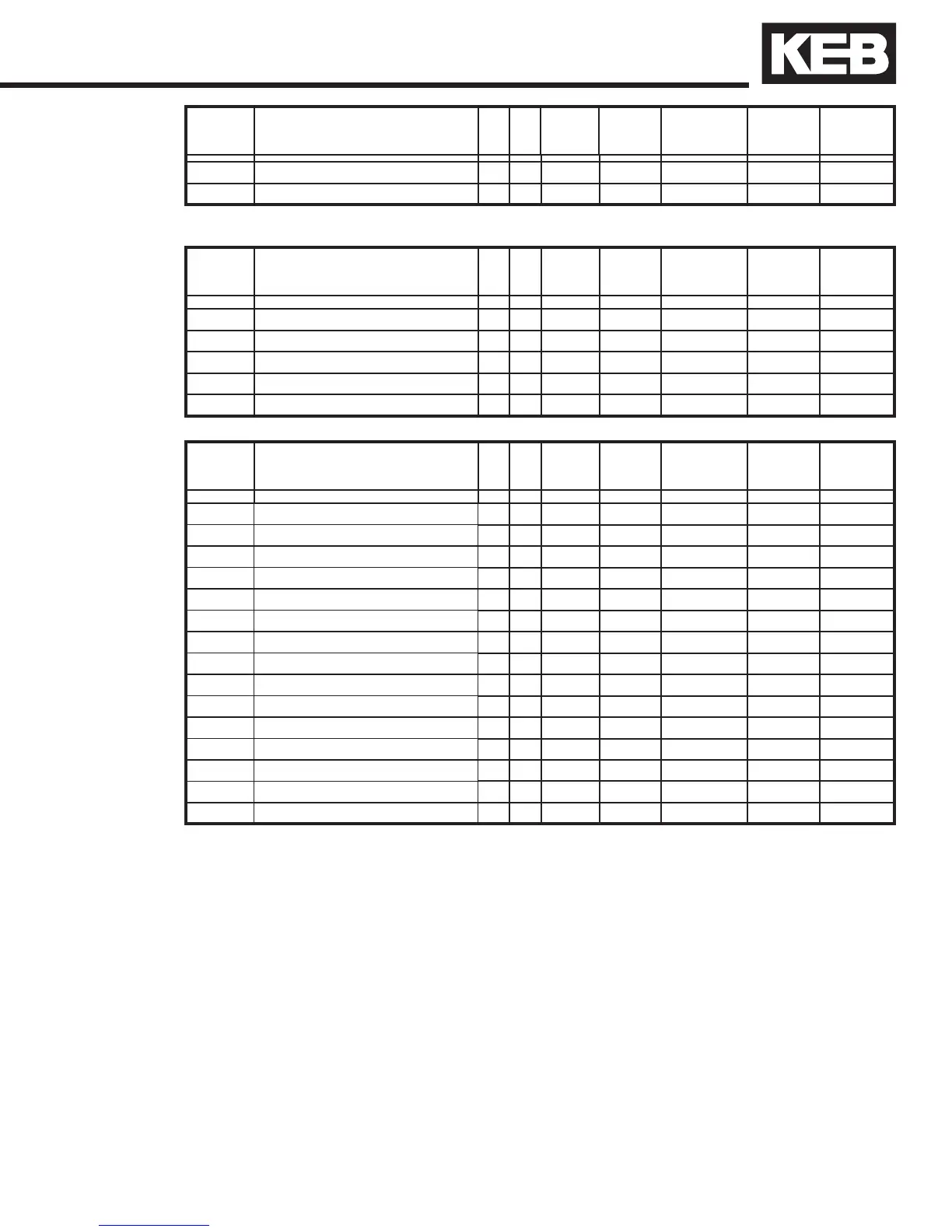
Para. Name E R Res. Lower
Limit
Upper
Limit
Default Unit
di.0 Input type E R/W 1 0 = PNP 1 = NPN 0 -
di.3 Noise Filter E R/W 1 0 127 5 mSec
Para. Name E R Res. Lower
Limit
Upper
Limit
Default Unit
do.42 Digital Output Inversion E R/W 1 0 15 0 -
do.80 Output X2A.18 E R/W 1 0 6 3 -
do.81 Output X2A.19 E R/W 1 0 6 0 -
d0.82 Output X2A.24...26 E R/W 1 0 6 2 -
d0.83 Output X2A.27...29 E R/W 1 0 6 3 -
Para. Name E R Res. Lower
Limit
Upper
Limit
Default Unit
Ld.18 Field Weakening Corner E R/W 0.1 0.0 6000.0 83% of LF.11 rpm
Ld.19 Field Weakening Curve E R/W 0.01 0.01 2.00 1.20 -
Ld.20 Stator Resistance E R/W 0.001 0.000 50.000 1.000 ohms
Ld.21 Sigma Inductance E R/W 0.01 0.01 500.00 10.00 mH
Ld.22 Rotor Resistance E R/W 0.001 0.000 49.9999 1.000 ohms
Ld.23 Mag. Inductance E R/W 0.1 0.1 3276.7 100.0 mH
Ld.24 Motor Control E R/W 1 0 255 8 -
Ld.25 Vmax Regulation E R/W 1 0 110 97 %
Ld.27 KP Current E R/W 1 1 32767 1500 -
Ld.28 KI Current E R/W 1 1 32767 500 -
Ld.29 Acceleration Torque E R/W 1 0 25000 0 Nm
Ld.30 System Inertia E R/W 1 0 1073741823 0 kgcm
2
Ld.31 FFTC Filter E R/W 1 0 9 0 -
Ld.32 FFTC Gain E R/W 0.1 0.0 200.0 0.0 %
Ld.33 Torque Command Filt. E R/W 1 0 10 1 -
Parameter List Reference

 Loading...
Loading...
















