Page 20 of 76
Actuator with relative positioning - Single Hall:
I/O specifications:
Input/Output Specification Comments
Description The actuator can be equipped with
Single Hall that gives a relative
positioning feedback signal when
the actuator moves.
See connection diagram,
fig. 5, page 19
Brown 12, 24 or 36VDC (+/-)
12V ± 20%
24V ± 10%
36V ± 10%
Under normal conditions:
12V, max. 26A depending on load
24V, max. 13A depending on load
36V, max. 10A depending on load
To extend actuator:
Connect Brown to positive
To retract actuator:
Connect Brown to negative
Blue To extend actuator:
Connect Blue to negative
To retract actuator:
Connect Blue to positive
Red Signal power supply (+)
12-24VDC
Current consumption:
Max. 40mA, also when the
actuator is not running
Black Signal power supply GND (-)
Green Not to be connected
Yellow Not to be connected
Violet Single Hall output (PNP)
Movement per Single Hall pulse:
LA362C: Actuator = 0.1 mm per count
LA363C: Actuator = 0.2 mm per count
LA363B: Actuator = 0.3 mm per count
LA363A: Actuator = 0.4 mm per count
LA365A: Actuator = 0.7 mm per count
Frequency:
Frequency is 30-125 Hz on Single
Hall output depending on load and
spindle. Overvoltage on the motor
can result in shorter pulses.
Output voltage min. V
IN
- 2V
Max. current output: 12mA
Max. 680nF
N.B. For more precise
measurements, please contact
LINAK A/S.
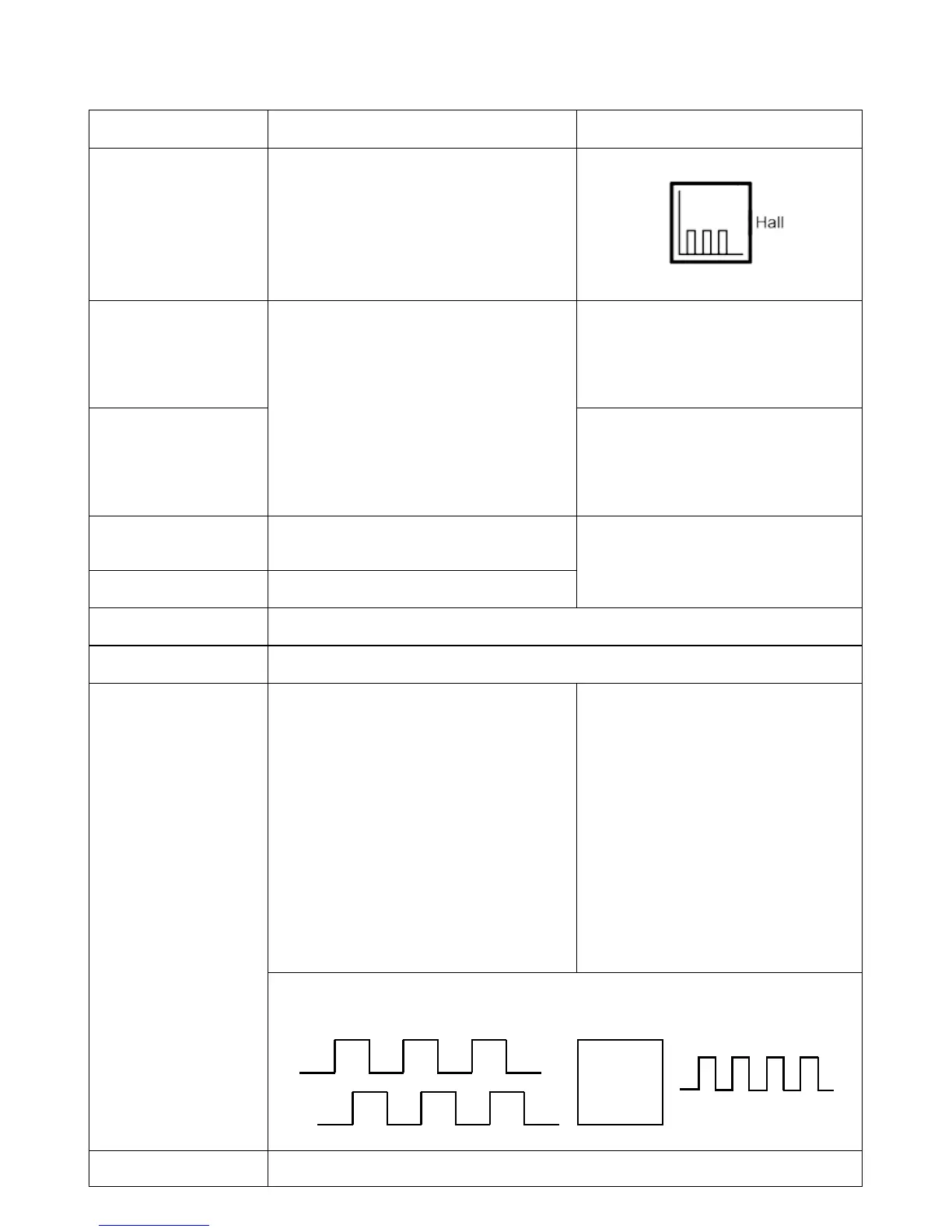
Low frequency with a high load.
Higher frequency with no load.
Diagram of Single Hall:
White Not to be connected
Fig. 5.1
Micro -
Processor
Input Single Hall output
Hall B
Hall A