LinMot
Design and Installation
User Manual V1.01 4-24
The SYS2 interface is configurable for the operation with CAN bus. The CAN bus is not
supported in normal operation and requires the implementation of a customer specific
protocol. For further questions regarding CAN bus coupling please contact Sulzer
Electronics AG.
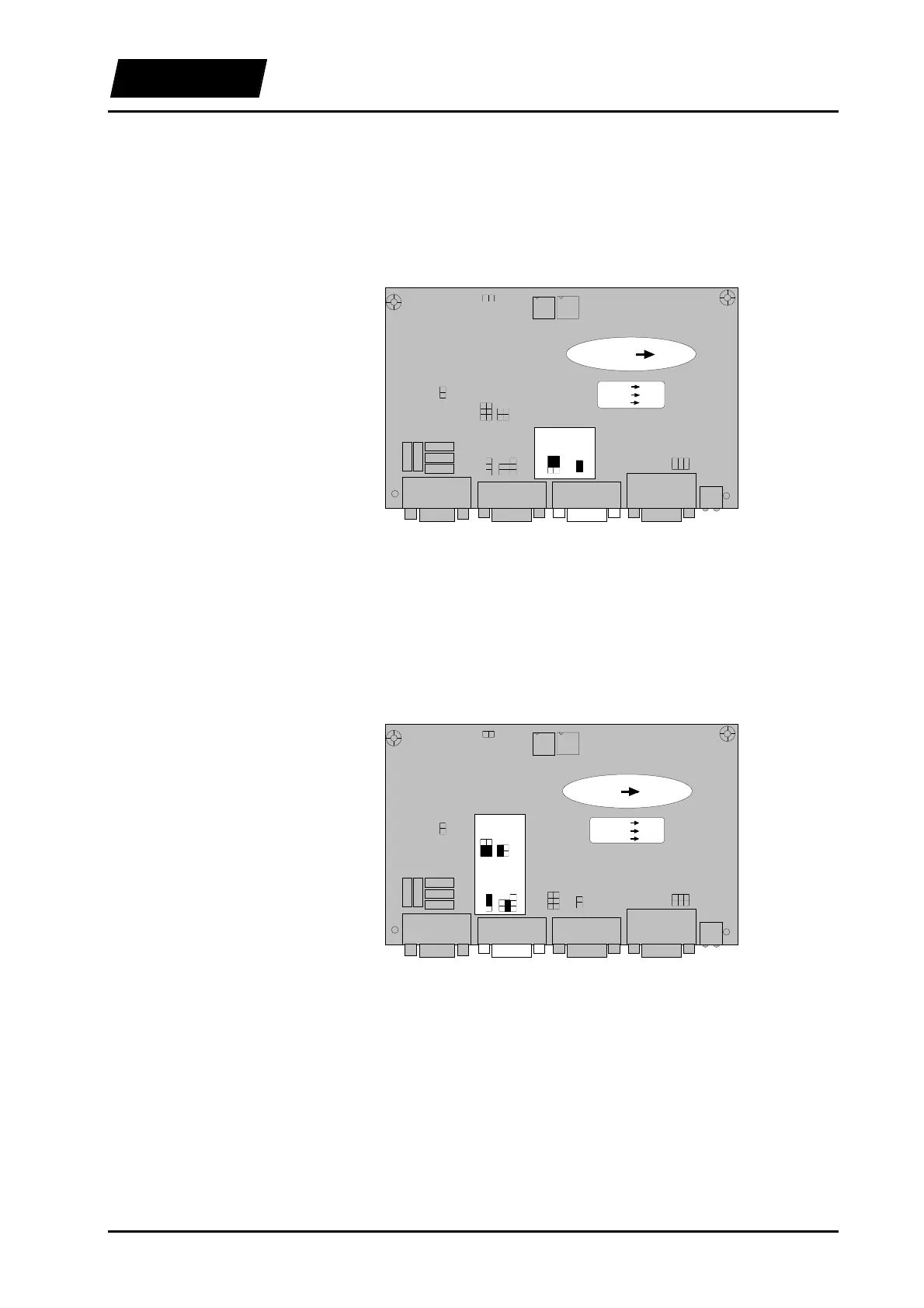
The jumper positions for SYS2 must not be changed, otherwise the inputs for the set
values will no longer be available.
J101
J511
J102
J510
Sys1Sys2Com
J504
J502
J503
J501
J402
J401
J509
J508
AN_IN_2/4 Sys2
J506
J507
J505
AN_IN_2 Pin 2
AN_IN_4 Pin 7
GND Pin 5
Figure 4-19: Configuration SYS2
By default the electronic unit is configured for operation with the analog inputs for the
set values and the trigger signals. The jumper positions for SYS2 must not be changed,
otherwise the inputs for the set values will no longer be available.
The Com interface for configuring the electronic unit via the PC software LinMot
Talk
is normally operated in the RS232 mode. Upon request an RS485 interface is available.
For further information regarding the RS485 interface please contact Sulzer Electronics.
J101
J511
J506
J507
J505
J102
J510
Sys1Sys2Com
J504
J502
J503
J501
J402
J401
J509
J508
RS232 Com
RS232_TX Pin 2
RS232_RX Pin 3
GND Pin 5
Figure 4-20: Configuration COM
By default the unit comes configured for operation with the RS232 interface.
SYS2 interface
COM interface