1-18
Engineering Guide CDA3000
1 Analysis of task
Positioning accuracy with position control
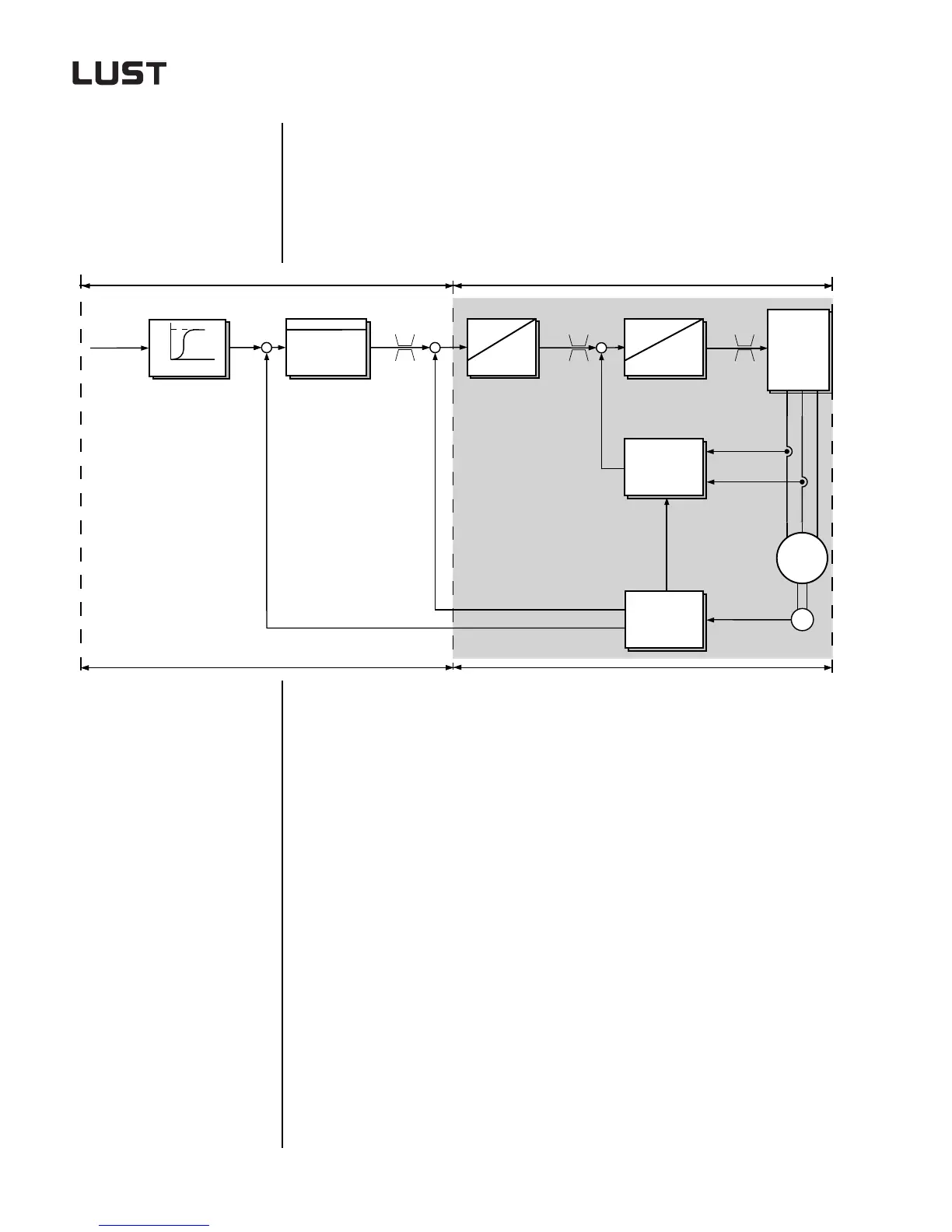
In the case of a positioning operation with position control in the controller,
the positioning accuracy is dependent on the encoder system and the qual-
ity of the position control (with or without pre-control, sampling time, etc.).
Figure 1.16 Positioning with reference generator and position control in the
controller
Reference generator
The reference generator generates the characteristic over time of the
reference position.
Position controller
The position controller ensures that the reference position is maintained
as closely as possible.
Speed controller
The speed controller in turn ensures that the reference speed of the
motor is maintained.
− The speed reference can be specified via +10 V to -10 V or via
CAN or PROFIBUS
uuu
c
a
b
a
i
b
i
M
3 ~
Modulator
and
PWR
-
Encoder
G
-
-
ε
RS
Speed
controller
m
reference
Torque
controller
U
reference
m
actual
x
reference
n
actual
n
reference
Position controller
x
actual
Calculation
of flux and
momentum
Angle of
rotation
and speed
recording
Reference generator
Destination
position
Control system
Inverter modul CDA3000
 Loading...
Loading...


