140
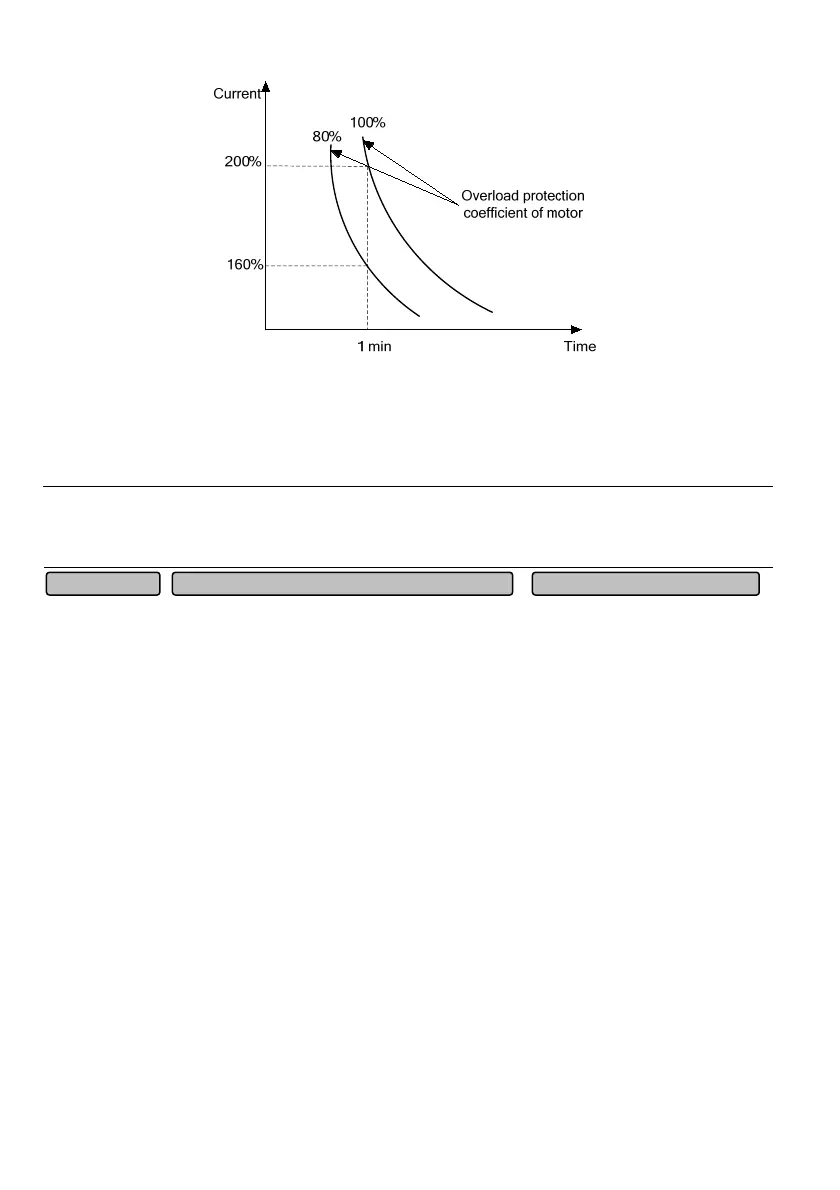
Fig. 6-13 Overload protection coefficient setting of motor
The adjustment value can be set according to your need. In the same conditions, if you want to realize
quick protection upon the motor overload, set a small value for P03.23; otherwise, a bigger value shall be
set.
Note
If the rated current of the load motor is not consistent with that of the drive, the motor overload protection can
be realized by setting the function code parameter of P03.23.
0: Disabled
1: Enabled (motor in static status)
Before the auto-tuning, be sure to enter the correct nameplate parameters of the controlled motor. If the
controlled motor is motor 1, input P03.00~P03.04; if the controlled motor is motor 2, input
P03.12~P03.16.
During the static setting of the asynchronous motor, the motor is in static state. The stator resistance (R1),
leakage inductive reactance relative to rated frequency (X) and rotator resistance (R2) of the
asynchronous motor will be automatically measured. The measured parameter values will be
automatically written into P03.06, P03.07 and P03.08 (for motor 2, they will be written into P03.18,
P03.19 and P03.20).
During the static auto-tuning of the synchronous motor, if “With PG vector control” is selected as the
control mode, The measured parameter values will be automatically written into P03.06, P03.07 and
P03.09 (for motor 2, they will be written into P03.18, P03.19 and P03.21). If “With PG vector control” is
selected, be sure to disconnect the motor shaft from the loads. It is prohibited to carry out setting when
the motor is connected to loads, and in such case, the installation angle of the encoder will be
automatically measured additionally and the measured value will be written into P03.26.
2: Enabled (motor in rotate status)
Before the auto-tuning, be sure to enter the correct nameplate parameters of the controlled motor. If the
controlled motor is motor 1, input P03.00~P03.04; if the controlled motor is motor 2, input
P03.12~P03.16.
Parameter auto-tuning 0~3 (0)P03.24
 Loading...
Loading...