164
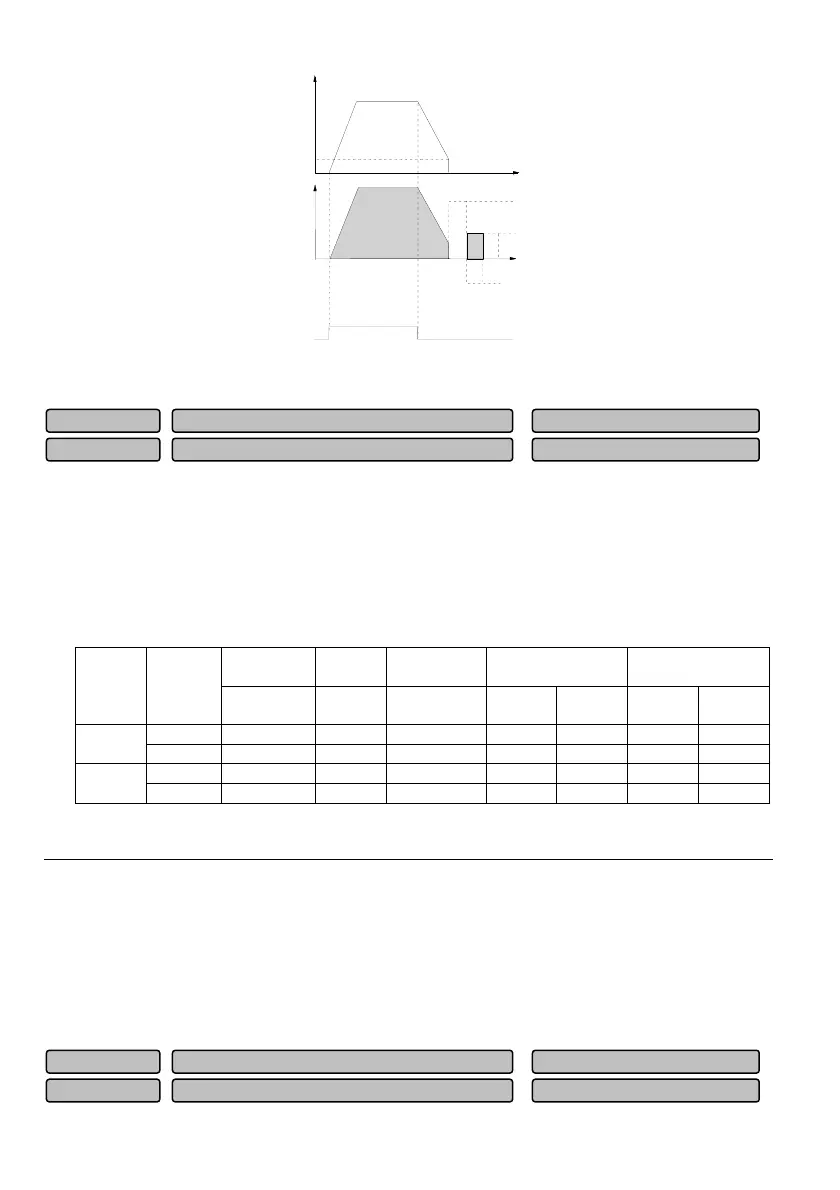
Fig. 6-29 Schematic diagram for “decelerate to stop + DC braking”
This function code is used to set whether the drive will start to run automatically and the waiting time
before the automatic running under different running command channels upon the power-up after power
down.
When P08.16 is set as 0, the drive will not run automatically upon the power-up after power down.
When P08.16 is set as 1, if the startup conditions are met, the drive will run automatically after the waiting
time defined by P08.17 upon the power-up after power down. Please refer to Table 6-5
Table 6-5 Startup conditions for re-start upon power down
Setting
of
P08.16
Status
before
power
down
Operating
panel
Serial
port
Three-wire
terminal 1, 2
Two-wire terminal 1 Two-wire terminal 2
None None None None
Availabl
e
None
Availabl
e
0
Stop 0 0 0 0 0 0 0
Run 0 0 0 0 0 0 0
1
Stop 0 0 0 0 0 0 1
Run 1 1 1 0 1 0 1
Indicates the actions of the drive upon power-up under different combination conditions. 0: Enter the
standby state; 1: Start to run automatically.
Note
1. When the start/stop is controlled through the operation panel, serial port and Three-wire terminal 1&2, the
command type is pulse type and there is no running command upon power-up.
2. Stop has the priority if there is any stop command.
3. When the function of re-start upon power down is enabled, if the drive is powered up again after it is not
completely powered down (i.e. the drive LED displays -LU- process), it will restart in the speed tracking mode;
if the drive is powered up again after it is completely powered down (i.e. the LED on the operation panel is
completely off), it will restart under the mode set by P08.00.
FWD/REV dead time
0.00~360.00s
0.00s
P08.19
Anti-reverse selection
0~1
0
P08.18
Waiting time for restart upon power fault
0.0~3600.0s
0.0s
P08.17
Selecting restart function upon power fault
0~1
0
P08.16
Output Freq.
Initial freq.of braking
Output volt.
Braking Energy
Braking time
Operating
command
Waiting time
(RMS value)
 Loading...
Loading...