169
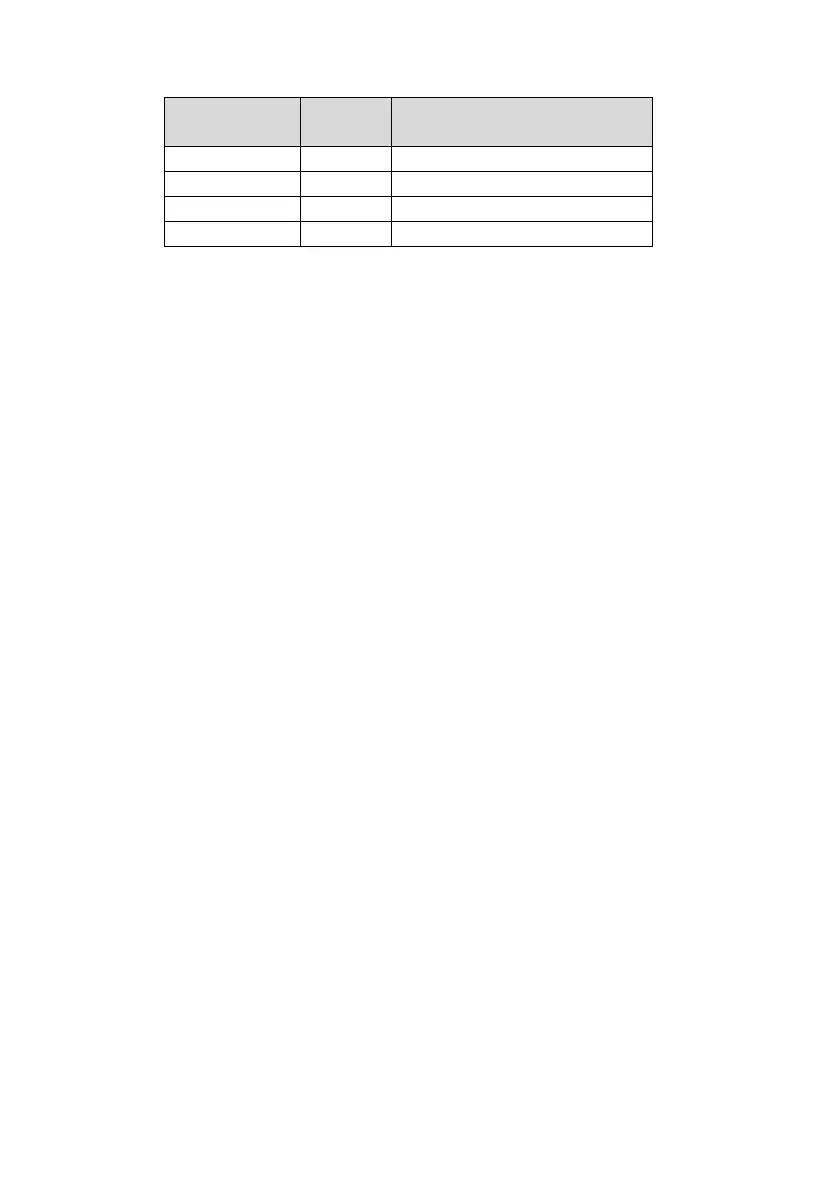
Table 6-9 Expression of acceleration/deceleration time selection
Te r m i n a l 2 Term in al 1
Acceleration or deceleration time
selection
OFF OFF Acceleration time 1/ deceleration time 1
OFF ON Acceleration time 2/ deceleration time 2
ON OFF Acceleration time 3/ deceleration time 3
ON ON Acceleration time 4/ deceleration time 4
If the drive needs to control two motors at the same time (the terminal function is selected as 55, i.e.
“Motor 1 and 2 switching terminal” function, and the terminal function is enabled), the
acceleration/deceleration time 1 and 2 refer to those of motor 1, and the acceleration/deceleration time 3
and 4 refer to those of motor 2. At this time, the acceleration/deceleration terminal 1 switches two groups
of acceleration/deceleration time (acceleration/deceleration time 1 and 2) for motor 1, and the
acceleration/deceleration terminal 2 switches two groups of acceleration/deceleration time
(acceleration/deceleration time 3 and 4) for motor 2
.
12: Main set frequency pulse input (valid only for X7 or X8)
It is only valid for the input terminals X7 or X8. It is used together with P02.04=4 to serve as the reference
of the main frequency. The relation between the input signal pulse frequency and the set frequency can
be adjusted through the curve of Group P10.
13: Auxiliary set frequency pulse input (valid only for X7 or X8)
It is only valid for the input terminals X7 or X8. It is used together with P02.04=4 to serve as the reference
of the auxiliary frequency. The relation between the input signal pulse frequency and the set frequency
can be adjusted through the curve of Group P10.
14: Frequency increase command (UP)
15: Frequency decrease command (DN)
The remote control of the frequency increase or decrease is realized through control terminals rather than
operation panel. It is enabled when P02.04=1 (common operation) or P02.07=2 (as auxiliary frequency).
The acceleration/ deceleration rate is set by P09.09.
16: External equipment fault normally open input
17: External equipment fault normally closed input
The fault signal of external equipments can be input through this terminal for monitoring fault of external
equipments by the drive. The drive will display “Er.EFT” ( i.e. external equipment fault alarm) upon
receiving the fault signal of external equipments; and such signals can adopt either the input mode of
normally open or normally closed.
18: External interrupt normally open contact input
19: External interrupt normally closed contact input
The drive will lock the output and run with zero frequency when receiving the external interrupt signal
during running. Once the external interrupt signal is removed, the drive will start in the speed tracking
mode and resume the running.
20: Reference frequency source switching command
 Loading...
Loading...